





























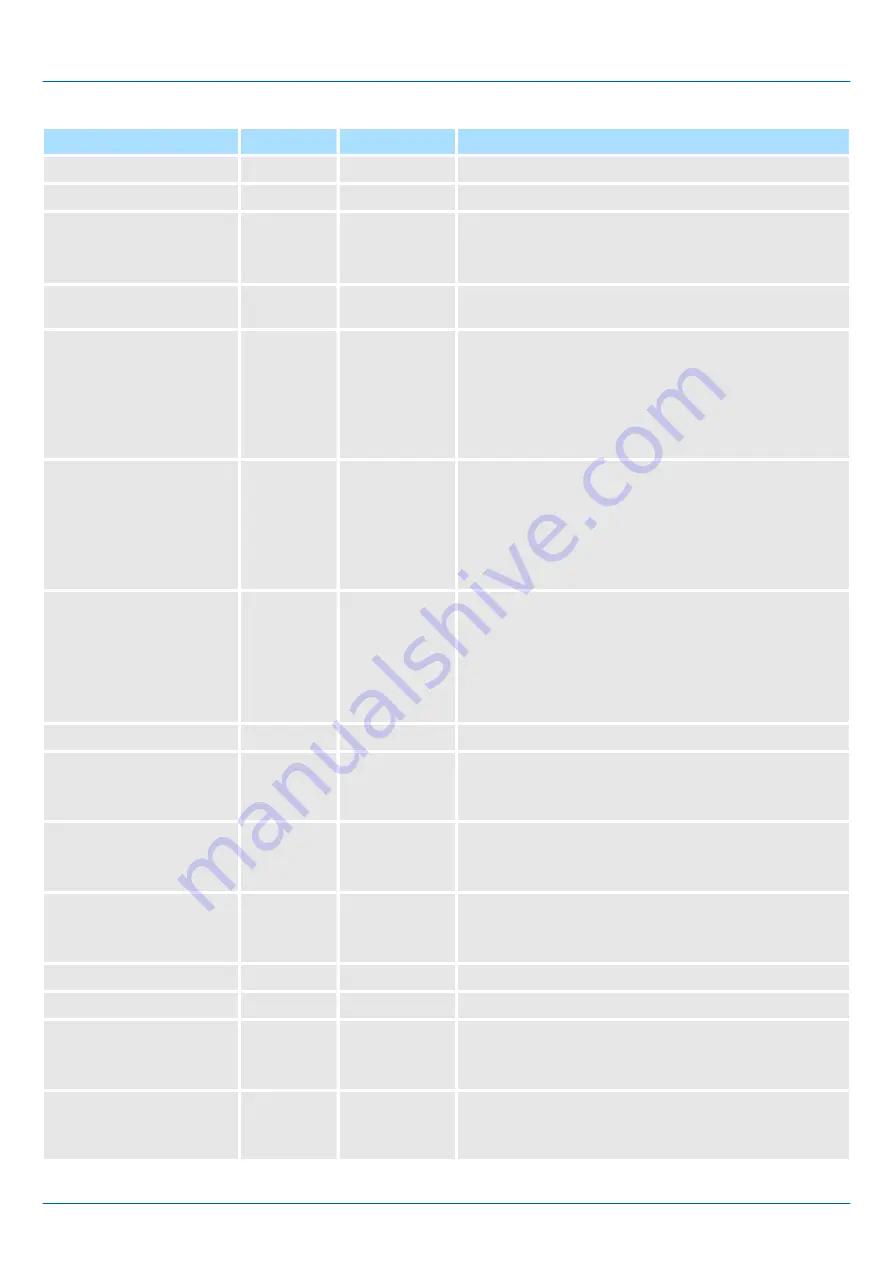
Parameter
Declaration
Data type
Description
InputsStartAddressPDO
INPUT
INT
Start address of the input PDOs
OutputsStartAddressPDO
INPUT
INT
Start address of the output PDOs
EncoderType
INPUT
INT
Encoder type
n
1: Absolute encoder
n
2: Incremental encoder
EncoderResolutionBits
INPUT
INT
Number of bits corresponding to one encoder revolution.
Default: 20
FactorPosition
INPUT
REAL
Factor for converting the position of user units [u] into
drive units [increments] and back.
It's valid: p
[increments]
= p
[u]
x
FactorPosition
Please consider the factor which can be specified on the
drive via the objects 0x2701: 1 and 0x2701: 2. This
should be 1.
Velocity Factor
INPUT
REAL
Factor for converting the speed of user units [u/s] into
drive units [increments/s] and back.
It's valid: v
[increments/s]
= v
[u/s]
x
FactorVelocity
Please also take into account the factor which you can
specify on the drive via objects 0x2702: 1 and 0x2702: 2.
This should be 1.
FactorAcceleration
INPUT
REAL
Factor to convert the acceleration of user units [u/s
2
] in
drive units [10
-4
x increments/s
2
] and back.
It's valid: 10
-4
x a
[increments/s
2
]
= a
[u/s
2
] x
FactorAcceleration
Please also take into account the factor which you can
specify on the drive via objects 0x2703: 1 and 0x2703: 2.
This should be 1.
OffsetPosition
INPUT
REAL
Offset for the zero position [u].
MaxVelocityApp
INPUT
REAL
Maximum application speed [u/s].
The command inputs are checked to the maximum value
before execution.
MaxAccelerationApp
INPUT
REAL
Maximum acceleration of application [u/s
2
].
The command inputs are checked to the maximum value
before execution.
MaxDecelerationApp
INPUT
REAL
Maximum application delay [u/s
2
].
The command inputs are checked to the maximum value
before execution.
MaxPosition
INPUT
REAL
Maximum position for monitoring the software limits [u].
MinPosition
INPUT
REAL
Minimum position for monitoring the software limits [u].
EnableMaxPosition
INPUT
BOOL
Monitoring maximum position
n
TRUE: Activates the monitoring of the maximum posi-
tion.
EnableMinPosition
INPUT
BOOL
Monitoring minimum position
n
TRUE: Activation of the monitoring of the minimum
position.
VIPA SPEED7
Motion control - Simple Motion Control Library
Usage Sigma-5/7 EtherCAT > Usage Sigma-7S EtherCAT
HB00 | OPL_SP7 | Operation list | en | 18-30
361