





























5.7 H: Terminal Functions
YASKAWA ELECTRIC
SIEP C710616 30B YASKAWA AC Drive T1000A Technical Manual
209
P
a
ra
me
te
r D
e
ta
ils
5
The pulse output monitor terminal MP can output drive monitor values as a pulse train signal with a maximum frequency
of 32 kHz. It can be used in sinking or sourcing mode.
Refer to Using the Pulse Train Output on page 66
for details.
Use parameters H6-
to set the scale and other aspects of the pulse input terminal RP and pulse output terminal MP.
n
H6-01: Pulse Train Input Terminal RP Function Selection
Selects the function of pulse train input terminal RP.
Setting 0: Frequency reference
If the pulse input is set for this function and the frequency reference source is set to pulse input (b1-01, b1-15 = 4), the
drive reads the frequency value from terminal RP.
Setting 1: PID feedback value
Using this setting, the feedback value for PID control can be supplied as a pulse signal at terminal RP. See
for details on PID control.
Setting 2: PID setpoint value
Using this setting, the setpoint value for PID control can be supplied as a pulse signal at terminal RP. See
for details on PID control.
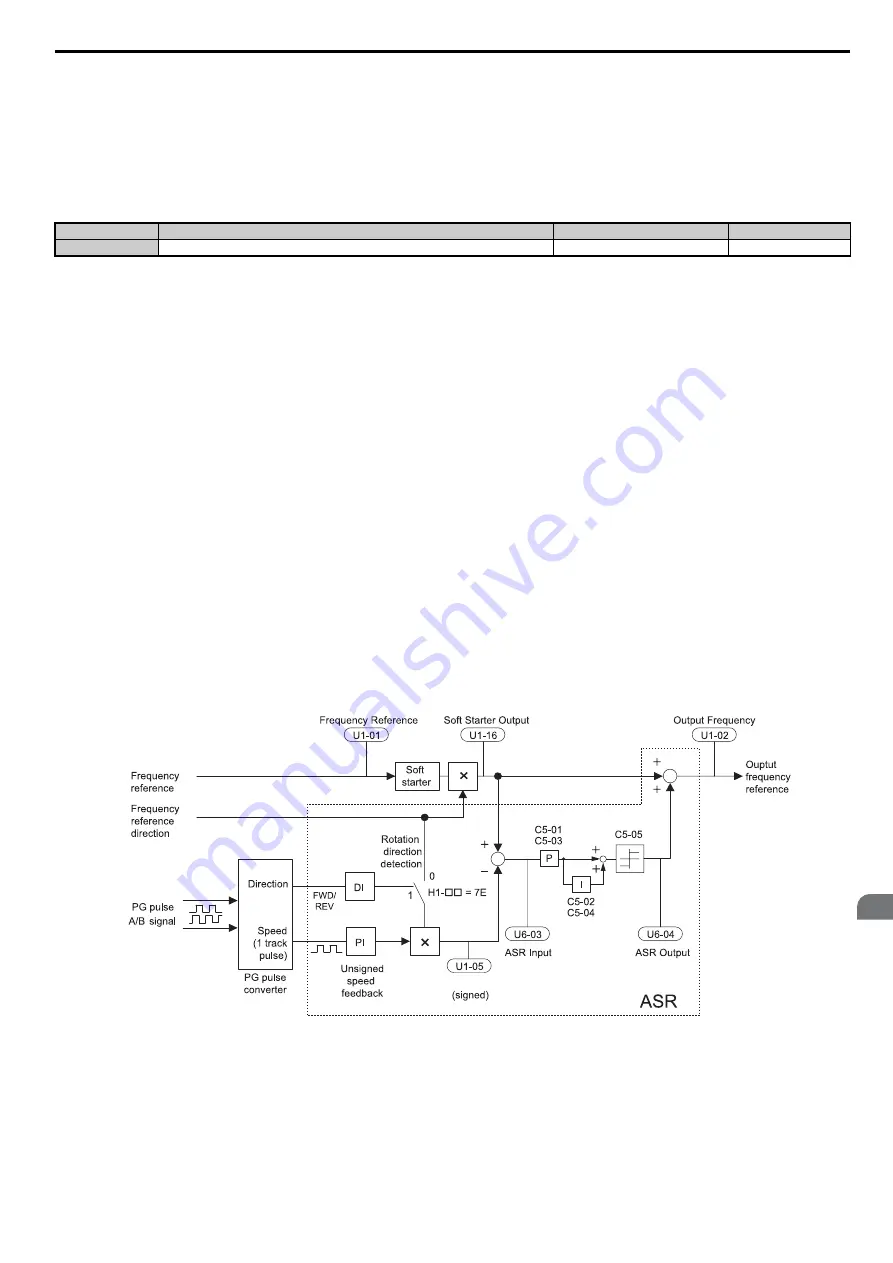
Setting 3: Speed feedback (V/f Control with Simple Speed Feedback)
This setting can be used in V/f control to increase the speed control precision by using a motor speed feedback signal.
The drive reads the speed feedback from terminal RP, compares it to the frequency reference and compensates the motor
slip using a speed regulator (ASR, setup in the C5-
parameters) like shown in
. Because input terminal
RP is incapable of detecting motor direction, a separate way of determining motor direction still needs to be set up:
1.
Using a Digital Input
If a digital input programmed for “Forward/reverse detection” (H1-
= 7E) is closed, the drive assumes
reverse rotation. If open, then the drive assumes that the motor is rotating forwards.
2.
Using the Frequency Reference Direction
If no digital input is set to “Forward/reverse detection” (H1-
= 7E), the drive uses the direction of the
frequency reference as the direction for the speed feedback detected at the pulse input.
Figure 5.76
Figure 5.76 Speed Control with ASR in V/f with Simple Speed Feedback
Enabling V/f Control with Simple Speed Feedback:
1.
Set the drive to V/f Control (A1-02 = 0).
2.
Connect the motor speed pulse signal to the pulse input RP, set H6-01 = 3, and set the pulse signal frequency
that is equal to the maximum speed to H6-02 (pulse input scaling). Make sure the pulse input bias (H6-04) is 0%
and the gain (H6-03) is 100%.
3.
Decide the signal used for detecting the direction. If a digital input is used, set H1-
= 7E.
No.
Name
Setting Range
Default
H6-01
Pulse Train Input Terminal RP Function Selection
0 to 3
0
Motor speed
(Commercial
product)