





























8.2 Troubleshooting
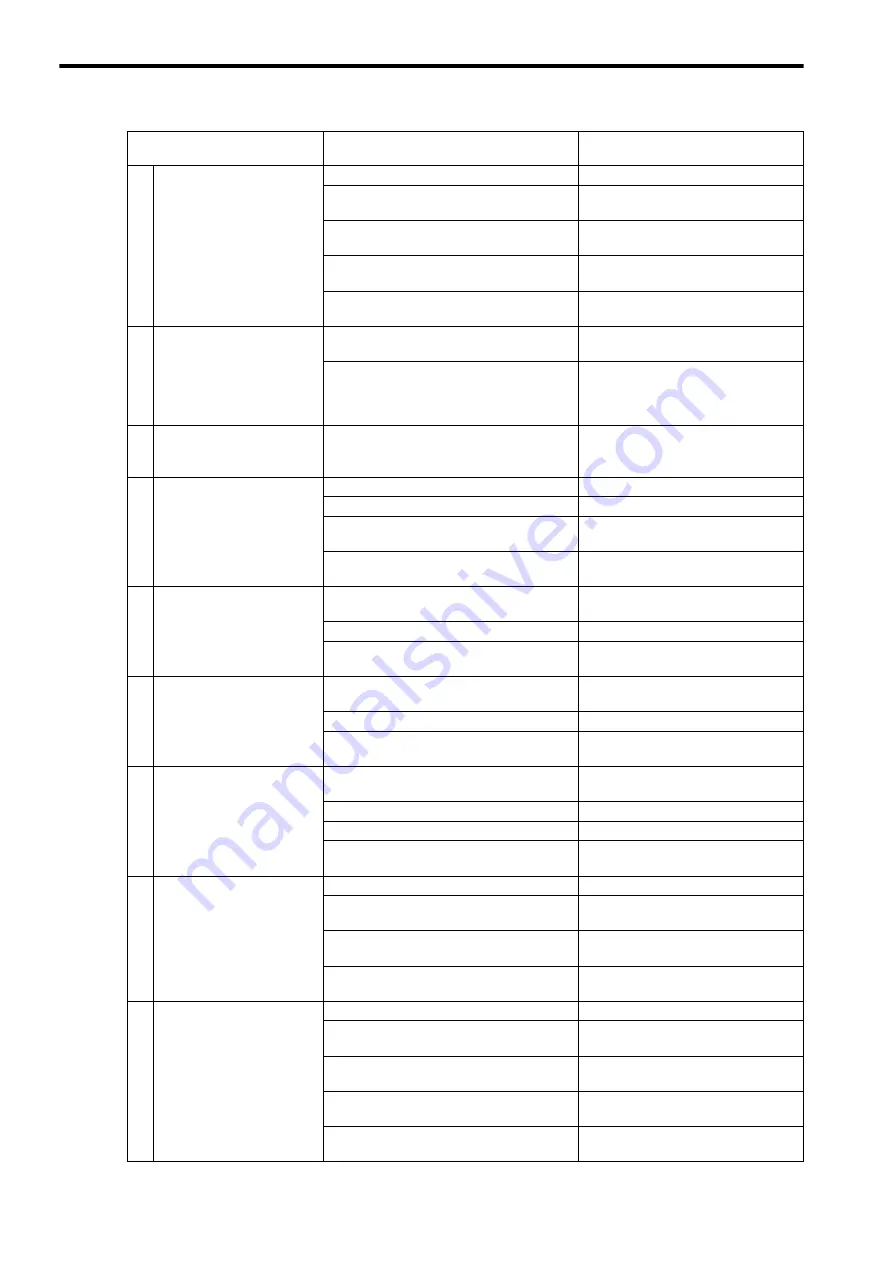
8.2.6 List of Causes for Command Error Completed Status
8-32
* When the fixed parameter Automatic Updating of Parameter was enabled, and the setting of Filter Time Constant,
Acceleration Rate/Time, or Deceleration Rate/Time was changed at the time a move command was set
17
•
18
Read SERVOPACK
Parameter
(PRM_RD)
Write SERVOPACK
Parameter
(PRM_WR)
An alarm is occurring.
−
Asynchronized communication status
A: Servo Driver Synchronization Com-
munication Error
SERVOPACK parameter reading was not com-
pleted within the specified time.
A: Servo Driver Command Timeout
Error
Warning A.94 or A.95 occurred in the
SERVOPACK.
W: Servo Driver Error
SERVOPACK parameter number or size is out
of the setting range.
W: Setting Parameter Error
19
•
20
Monitor SERVOPACK
Alarms
(ALM_MON)
Monitor SERVOPACK
Alarm History
(ALM_HIST)
The command to the SERVOPACK was not
completed within the specified time.
A: Servo Driver Command Timeout
Error
Servo driver alarm monitor number is out of
setting range.
W
:
Setting Parameter Error
21
Clear SERVOPACK Alarm
History
(ALMHIST_CLR)
The command to the SERVOPACK was not
completed within the specified time.
A: Servo Driver Command Timeout
Error
22
Reset Absolute Encoder
(ABS_RST)
This command was used for
Σ
-I SERVOPACK.
−
Executed while servo is ON.
−
Asynchronous communication status
A: Servo Driver Synchronization Com-
munication Error
The command to the SERVOPACK was not
completed within the specified time.
A: Servo Driver Command Timeout
Error
23
Speed Reference
(VELO)
Commanded when having been connected to
MECHATROLINK-I
−
An alarm is occurring.
−
Asynchronous communication status
A: Servo Driver Synchronization Com-
munication Error
24
Torque Reference
(TRQ)
Commanded when having been connected to
MECHATROLINK-I
−
An alarm is occurring
−
Asynchronous communication status
A: Servo Driver Synchronization Com-
munication Error
25
Phase Reference
(PHASE)
The axis is ABS infinite length, and the zero
point return (setting) is not completed.
A: Zero Point Not Set
In servo OFF status
A: Servo OFF
An alarm is occurring.
−
Asynchronous communication status
A: Servo Driver Synchronization Com-
munication Error
26
Change Position Loop
Integration Time Constant
(KIS)
An alarm is occurring.
−
Asynchronous communication status
A: Servo Driver Synchronization Com-
munication Error
SERVOPACK parameter writing was not com-
pleted within the specified time.
A: Servo Driver Command Timeout
Error
Warning A.94 or A.95 occurred in the
SERVOPACK.
W: Servo Driver Error
Others
Parameter Automatic
Updating when
Execution of Move
Command Starts
*
An alarm is occurring.
−
Asynchronous communication status
A: Servo Driver Synchronization Com-
munication Error
SERVOPACK parameter writing was not com-
pleted within the specified time.
A: Servo Driver Command Timeout
Error
Warning A.94 or A.95 occurred in the
SERVOPACK.
W: Servo Driver Error
The distribution was not completed (DEN =
OFF).
−
Motion Command Code
Cause of Command Error Occurrence
Warning (W:) and Alarm (A:) That Occur
at Command Error Occurrence
Summary of Contents for MP2300S
Page 14: ...MEMO...
Page 24: ...MEMO...
Page 114: ...MEMO...
Page 132: ...MEMO...
Page 154: ...5 2 User Programs 5 2 2 Motion Programs 5 22 2 Example using a ladder program...
Page 156: ...5 2 User Programs 5 2 2 Motion Programs 5 24 2 Example using a ladder program...
Page 190: ...MEMO...
Page 280: ...MEMO...
Page 300: ...7 3 Operation 7 3 5 How to Determine Input Error 7 20 Continued from the previous page...
Page 310: ...MEMO...