





























Description of Units and Circuit Boards
8
-
71
8.16
External axes overrun
CAUTION!
Injury and material damage in case of a non-functional signal
Jumper cables are installed at the factory. If the cables are not removed, injury or damage
to machinery may result and the external emergency stop will not work even if the signal is
input.
Be sure to remove the jumper cables before using.
With a unit of standard specifications without an external axis, the external axis overrun
input signal is not used. In this case, a jumper cable is connected as shown in the following
figure.
If an overrun input signal for an axis other than manipulator axes, for example the external
axis, is required, connect the signal input circuit in the following manner.
For safe reason, a dual circuits are used for the external axis overrun signal input. Connect
the external axis overrun signal so that both input signals are turned ON or OFF at the same
time.
If only one signal is turned ON, the machine safety signal error occurs.
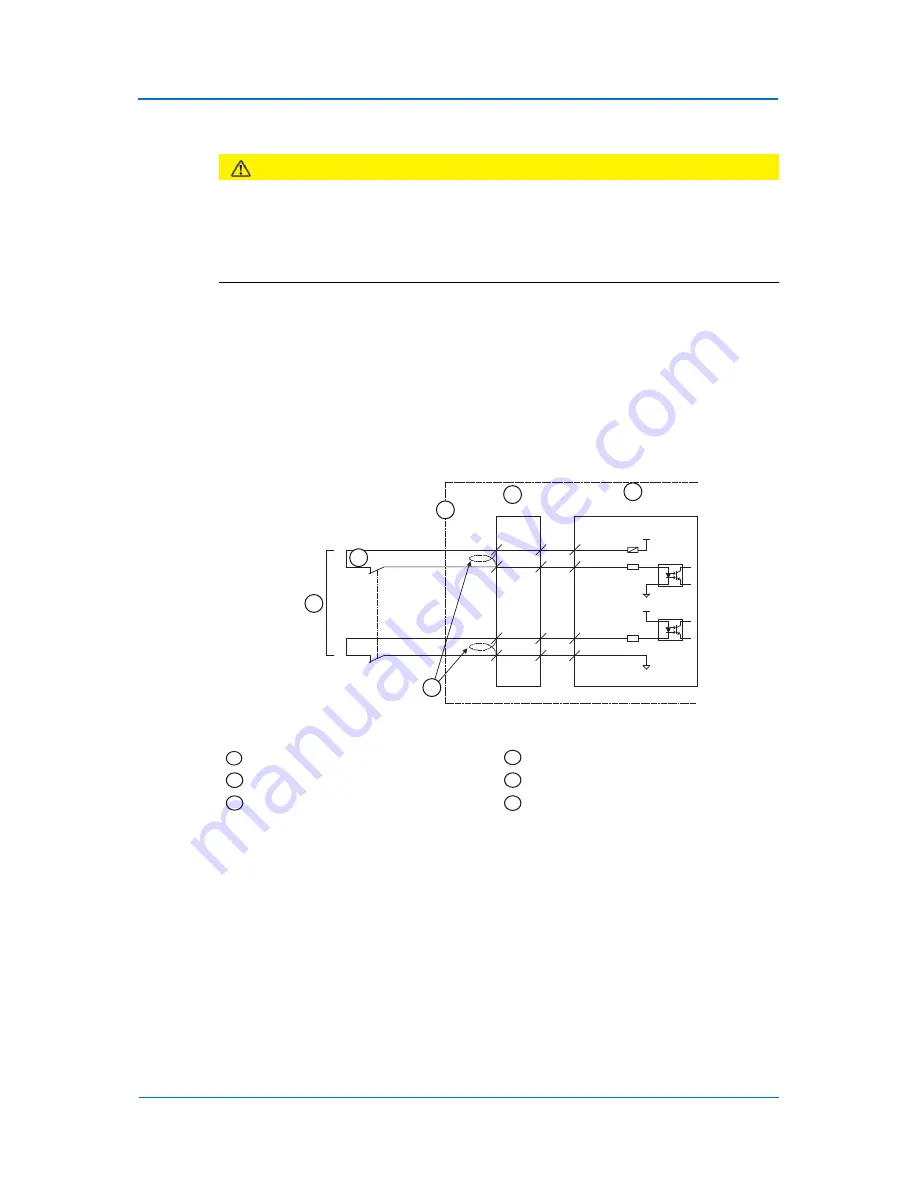
Fig. 8-14: Connection for external axis overrun
The following figure shows the external axis overrun wiring of the factory default setting
when the external axes are connected to the robot controller.
Please refer to the following figure to connect the external axes overrun signal to wire in the
another route. On that occasion, confirm the external axes overrun setting to connect.
Robot controller
External axis overun
I/O terminal (machine safety)
Remove the jumper cable
I/O board (machine safety)
Turn OFF/ON at the same time
42
43
44
45
CN219
OT2_1-
OT2_2-
OT2_1+
OT2_2+
-X18
(JANCD-YSF22-E)
1
2
3
4
6
5
1
4
2
5
3
6







































































