





























Appendix ES2 Series Servo User Manual Lite V1.0
51
Function
code
Name
Setting range
Min.
unit
Default
setting
Effective
time
Type
Mode
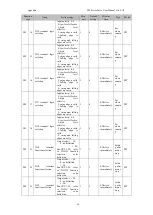
P07
11
Gain
switching
mode
0-first gain fixed
1-second gain fixed
2-using DI input
(GAIN-SWITCH)
3-torque command
greater
4-speed command
change greater
5-speed command
greater
6-position deviation
greater (P)
7-receive position
command (P)
8-positioning is not
completed (P)
9-actual speed is
greater (P)
10-receive position
command
and
actual speed (P)
11-speed
loop
controller
with
PDFF control (PS)
12-reserved
13-speed
loop
controller
with
improved PI control
(PS)
1
0
Effective
immediate
ly
Set
when
runnin
g
PS
P07
12
Gain
switching
delay
0~1000.0ms
0.1ms
5.0ms
Effective
immediate
ly
Set
when
runnin
g
PS
P07
13
Gain
switching
level
0~20000
(unit:
according to the gain
switching
mode
description)
1
50
Effective
immediate
ly
Set
when
runnin
g
PS
P07
14
Hysteresis time of
gain switching
0~20000
(unit:
according to the gain
switching
mode
description)
1
33
Effective
immediate
ly
Set
when
runnin
g
PS
P07
15
Position
gain
switching time
0~1000.0ms
0.1ms
3.3ms
Effective
immediate
ly
Set
when
runnin
g
PS
P07
16
Speed
regulator
PDFF coefficient
0~100.0%
0.1%
100.0%
Effective
immediate
ly
Set
when
runnin
g
PS
P07
17
Improved speed PI
control level
2~7
1
5
Effective
immediate
ly
Set
when
runnin
g
PS
P07
18
Anti-integration
saturation
coefficient
0~1.000
0.001
0.820
Effective
immediate
ly
Set
when
runnin
g
PS






































































