















A.1. CE certification of the Robot Installation
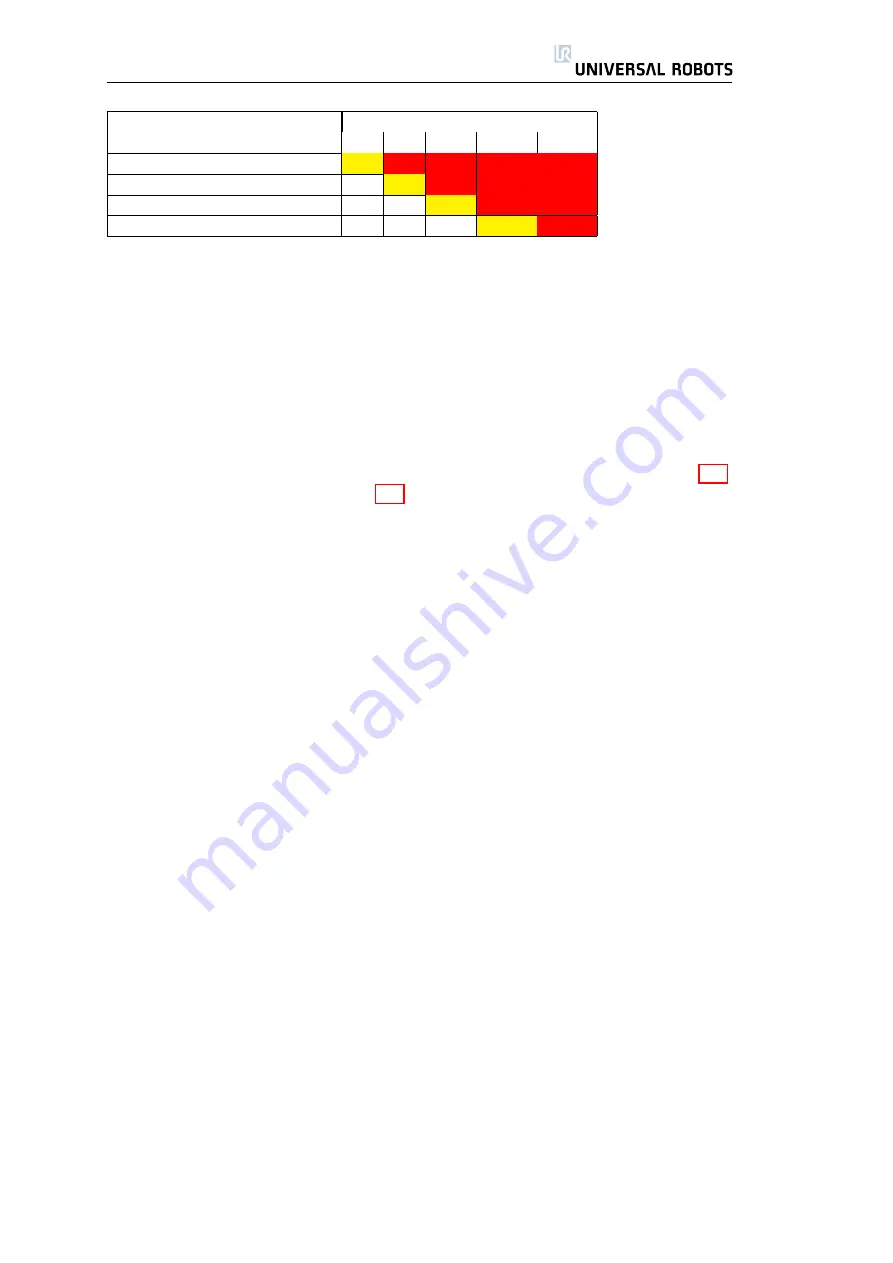
Seriousness
Class
3-4
5-7
8-10
11-13
14-15
4: Death, loss of eye or arm
D
E
F
G
H
3: Permanent, loss of finger
C
D
E
F
G
2: Reversible, Hospital
B
C
D
E
F
1: Reversible, First Aid
A
B
C
D
E
Table A.2: Risk Assessment for an accident
Avoidance, av
When an accident is about to happen, how likely is it that it can be avoided,
for instance by jumping to the side or by pressing emergency stop.
A.1.3
Risk Assessment
Estimate how serious the accident can be, and use this estimate in combination
with the sum of values for frequency, probability and avoidance (in table A.1)
to assess the risk class, using table A.2.
If the class is E,F,G or H, the safety around the robot installation should be
improved. If the class is D, an effort should be made to improve the safety. If the
class is A, B or C, ordinary care should be exercised around the robot.
A.1.4
Example
Consider a robot installation, where a robot uses a suction disc to lift items from
a machine to a box. The robot is not shielded, and programmed so it moves at
less than
250
mm/sec
. People often walk by the robot in a passage outside the
robot’s trajectory, but within reach of the robot.
There are two potential accidents in this installation.
1. An error in the robot’s program can cause it to reach out into the passage.
2. A person moves close to the robot, for example to service the machine,
without first stopping the robot.
A risk assessment needs to be performed for each accident, requiring that
the
frequency
,
probability
and
avoidance
need to be evaluated for each ac-
cident.
Example 1: Error in a robot program.
Errors in the robot program can happen
whenever the robot has been reprogrammed, let’s say daily,
f r
= 5
. Errors in the
robot program will only rarely cause it to move to the passage area, since the
graphics on the programming screen shows the tool trajectory. This accident
can only happen when a programmer has just programmed the robot and for-
gotten to check the robot’s trajectory. Therefore,
pr
= 2
. And since the robot
is only moving at
250
mm/s
, it is probable that the accident can be avoided,
so
av
= 3
. The sum,
f r
+
pr
+
av
, is
5 + 3 + 2 = 10
. Being hit by the robot can
cause bruises that can be treated using first aid. Therefore, the lowest line of
the risk assessment table is used, resulting in risk class
C
. The risk can be further
reduced, for instance by blocking the passage of people during programming
and testing of the robot.
79
UR-6-85-5-A
Summary of Contents for UR-6-85-5-A
Page 1: ...UR 6 85 5 A User Manual Version 1 11 January 2010...
Page 2: ...2 UR 6 85 5 A...
Page 6: ...Contents 6 UR 6 85 5 A...
Page 16: ...1 4 Mounting Instructions 16 UR 6 85 5 A...
Page 33: ...Chapter 3 PolyScope Software 33...





















































