





























TMCM-3314 TMCL
™
Firmware Manual • Firmware Version V1.11 | Document Revision V1.10 • 2019-JAN-25
129 / 144
6.3.2
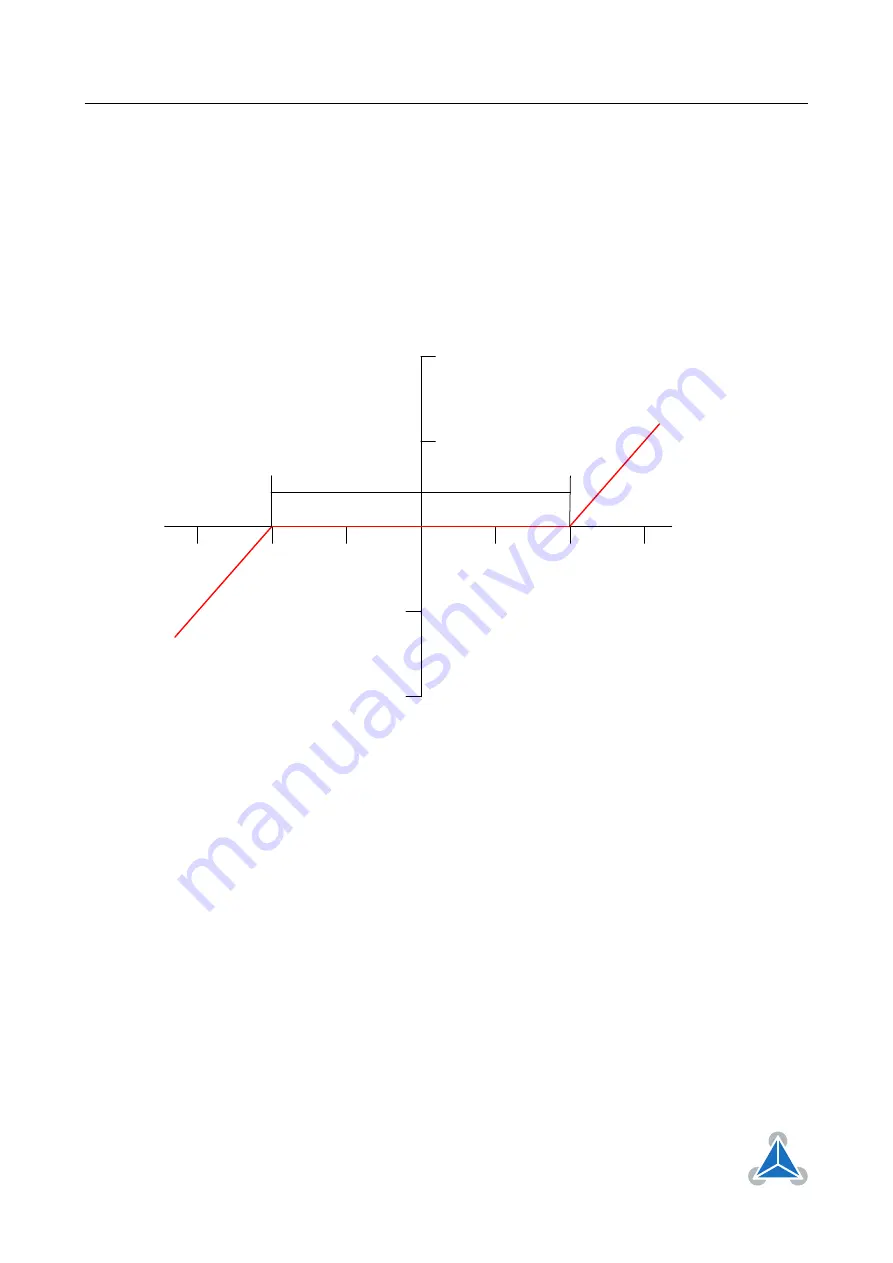
Load Angle Control
As typical for stepper motor drivers, phase currents will be assigned directly to he motor drivers. This
results in a current vector which should be followed by the rotor.The rotor position will be directly sampled
by encoder feedback. The closed-loop motor control monitors the resulting load angle (deviation between
driver stage current vector and encoder angle). Further on, the direction of the current vector will track the
rotor position if the load angle should impend to exceed a certain limit. The result is a load angle which
will be never exceed the given limit and as a result no step loss will occur. Thus, the current vector will
follow an overpowered load until the load is reduced.
Figure
shows the parameters which limit the load angle.
Load Angle [µSteps](Deviation Current Vector and Encoder)
X_TARGET
X_TARGET - 128
128(45°)
255(90°)
-128(-45°)
-255(-90°)
0°
Current Vector [µSteps](Driver Stage)
X_TARGET - 255
X_ 128
X_ 255
SAP 111
SAP 111
383(135°)
-383(-135°)
Figure 12: Load Angle Control Parameter
6.3.3
Current Level Control
Parallel to the load angle control the TMCM-3314 controls the motor current level (current vector ampli-
tude) depending on the load angle to save energy during no or light load. Figure
gives an overview of
the current control parameters.
©2019 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at







































































