





























TMCM-3314 TMCL
™
Firmware Manual • Firmware Version V1.11 | Document Revision V1.10 • 2019-JAN-25
109 / 144
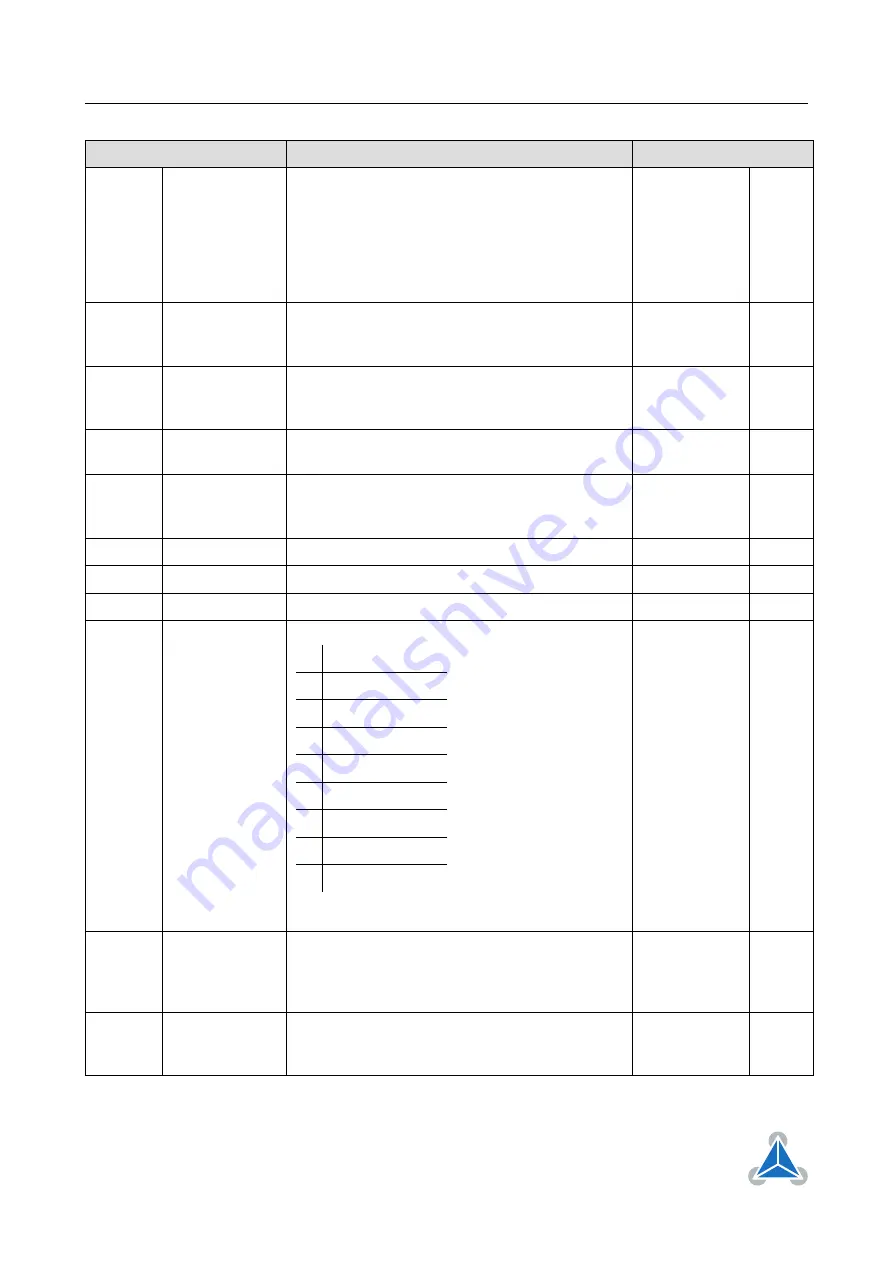
Number
Axis Parameter
Description
Range [Units]
Access
129
Closed Loop
Mode
0 - closed loop off
1 - closed loop on
2 - PID mode based on v
actual
3 - PID mode based on v=0
After switching on closed loop, please wait until
parameter #133 is 1 before executing any mo-
tion commands.
0/1
RW
131
measured
speed
Speed measured using the encoder.
-2147483648
. . . 2147483647
[pps]
R
132
current
measured
speed
Speed measured using the encoder, without av-
eraging.
-2147483648
. . . 2147483647
[pps]
R
133
Closed Loop
Init Flag
0 - initialization not finished yet
1 - closed loop initialization finished
0/1
R
134
Positioning
window
Maximum deviation for target reached flag to be
set.
0. . .
2147483647
[µsteps]
RW
136
EncMeanWait
Enocder filter related
RW
137
EncMeanFilter
Encoder filter related
RW
138
EncMeanInt
Encoder filter related
RW
140
Microstep
resolution
Microstep
resolutions
per
full
step:
0
fullstep
1
halfstep
2
4 microsteps
3
8 microsteps
4
16 microsteps
5
32 microsteps
6
64 microsteps
7
128 microsteps
8
256 microsteps
Always leave at 8 (256 microstpes) when
using closed loop operation!
0. . . 8
RW
162
Chopper blank
time
Selects the comparator blank time. This time
needs to safely cover the switching event and
the duration of the ringing on the sense resistor.
Normally leave at the default value.
0. . . 3
RW
163
Constant TOff
mode
Selection of the chopper mode:
0 – spread cycle
1 – classic constant off time
0/1
RW
©2019 TRINAMIC Motion Control GmbH & Co. KG, Hamburg, Germany
Terms of delivery and rights to technical change reserved.
Download newest version at





















































