





















IDX Manual (V1.15 / September 26
th
, 2008)
23
Copyright © 2005-2008, TRINAMIC Motion Control GmbH & Co. KG
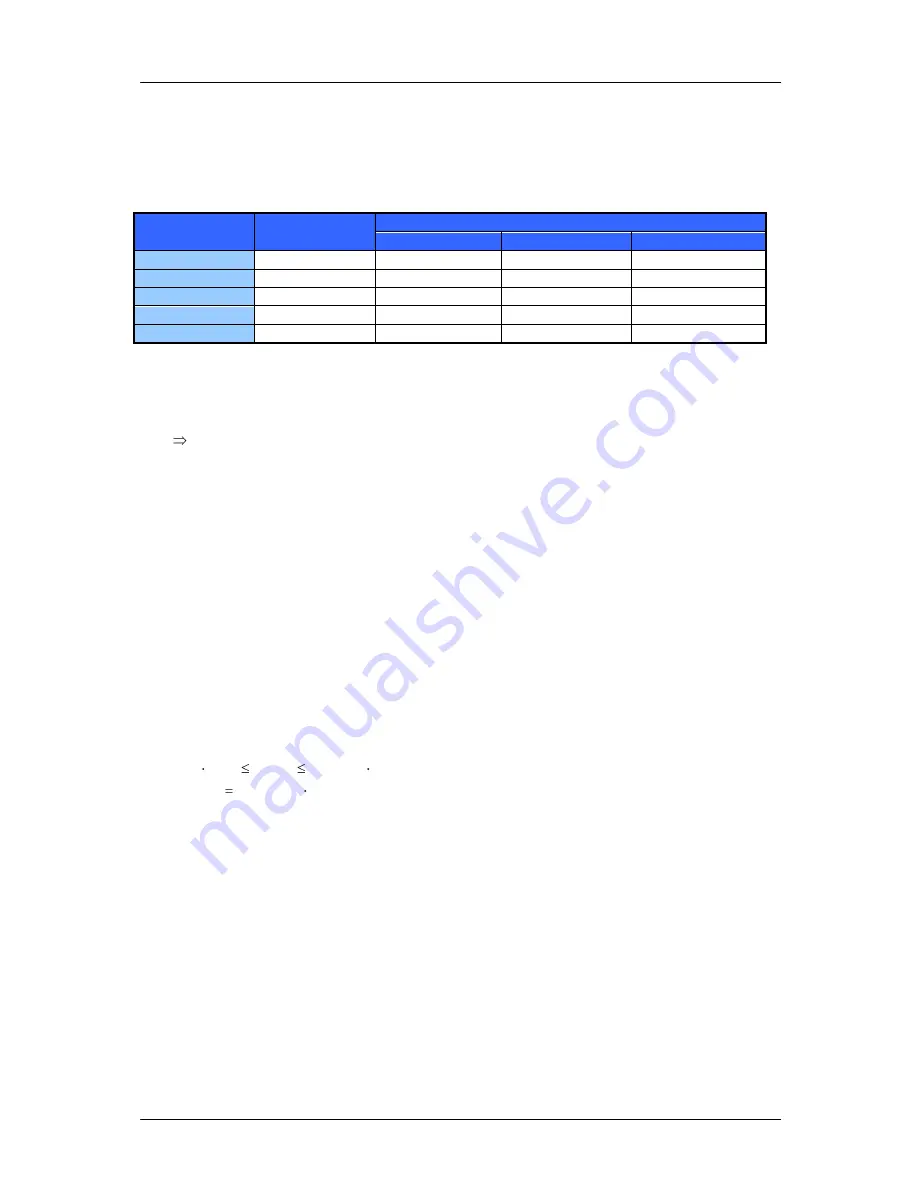
5.8.1.11
Microstep Resolution (Z)
The microstep resolution can be set by the user. It depends on the maximum resolution witch differs
in the three different chopper modes (see 5.8.2).
The maximum resolution is set by the parameter ‘Z’.
Parameter Z
Microstep resolution
SPI
PWM
Phase (default)
0
max resolution
64 *)
64
256
1
1/2 max
32 **)
32
128
2
1/4 max
16
16
64
3
1/8 max
8
8
32
4
1/16 max
4
4
16
Table 5.10: Adjustment of Microstep Resolution
*) Simulated microsteps, the actual microsteps of the motor are not improved compared to Z = 1.
**) Simulated microsteps, the actual microsteps are improves but do not reach 32 microsteps.
Example:
AZ 2
ENTER : Sets the microstep resolution to a quarter of the maximum resolution.
5.8.2
Chopper Modes
5.8.2.1
Chopper Mode 0 (SPI) / Default Mode
In this mode, the motor coil current is regulated on a chopper-cycle-by chopper-cycle bias. This is the
standard operation mode for most motor drivers. It brings a medium microstep resolution of 16
microsteps and typically works good with most motors and a high range of supply voltage and motor
current settings. A resolution of up to 64 microsteps can be simulated but the motor precision is only
slightly improved compared to 16 microsteps and the same as with 32 microsteps.
The maximum supply voltage (V
S
) of the motor must not exceed 22-25 times the nominal motor
voltage (V
N
), regarding the multiplication of I
COIL, MAX
and R
MOTOR
. A higher value would lead to an excess
of motor rating.
The minimum supply voltage has to be above two times the nominal motor voltage.
MOTOR
MAX
,
COIL
N
N
S
N
R
I
V
V
25
...
22
V
V
2
It uses a chopper frequency of about 36kHz.







































































