



















3 Quick Start Guide
The MCT8316ZTEVM requires a power supply source, which has a recommended operating range from a 4.5 V
to 35 V. To setup and power the EVM, use the following the sequence:
1. Connect motor phases to A, B, and C on connector J13.
2. Connect Hall sensors to J11 and select Hall power supply as 3.3 V from buck or an external Hall supply
on J12. Ensure the MODE resistors are set correctly to use the appropriate Hall sensor configuration as
described in
a. If using digital Hall inputs, populate J8–J10 with shunt jumpers to enable pullups. Connect the single-
ended inputs to only the HPx pins on connector J11. This is the default of the MCT8316ZTEVM.
b. If using analog Hall inputs, remove J8-J10 and connect differential Hall inputs to HPx and HNx on
connector J11.
3. Ensure resistors are populated in H/W variant resistors for desired hardware settings.
4. Do not turn on the power supply yet. Connect the motor supply to VBAT or VM and PGND on connector J7.
a. To enable reverse polarity protection and Pi filter, connect to VBAT. Note that when connecting to VBAT,
VM will be VM – 0.7 V less, due to a diode drop in the reverse-polarity protection circuit.
b. To disable reverse-polarity protection and the Pi filter, connect to VM.
5. Select J3 to 5V_USB and J5 to 3V3COM to power MSP430 from USB power supply.
6. Connect the micro-USB cable into the computer.
7. Turn the potentiometer fully clockwise to set the motor to zero speed upon powerup.
8. Turn on the motor power supply.
9. Use the potentiometer to control the speed of the motor and the switches to disable the motor driver, change
the direction, or apply a brake to the motor. Optionally, use the GUI (as shown in
real-time speed of the motor, put the MCT8316ZT into a low-power sleep mode, and read status of the
LEDs.
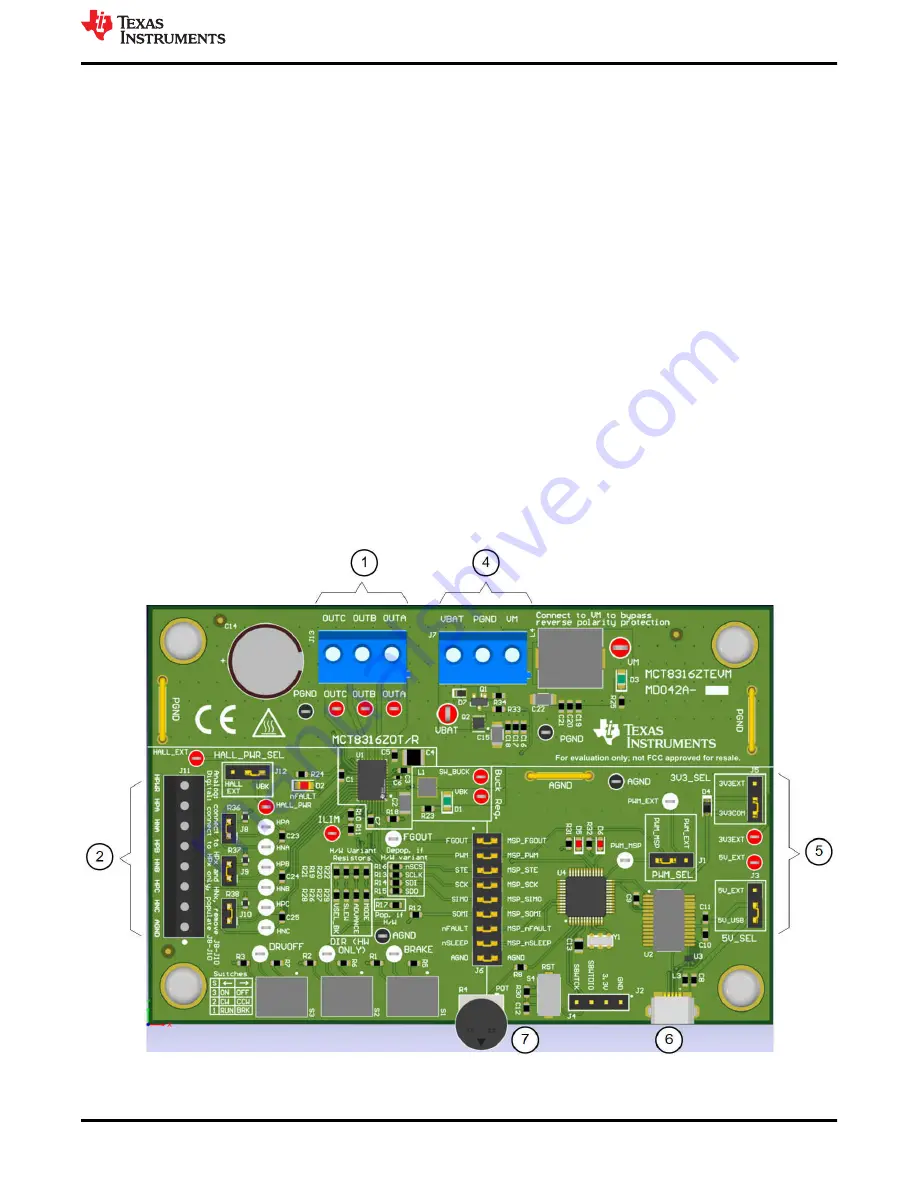
Figure 3-1. Reference for Quick Start Guide
Quick Start Guide
SNLU291B – MARCH 2021 – REVISED AUGUST 2022
MCT8316ZTEVM Evaluation Module
5
Copyright © 2022 Texas Instruments Incorporated







































































