






















Note
MCT8316A provides an undervoltage recovery mode [MIN_VM_MODE] and Overvoltage recovery
mode [MAX_VM_MODE]. Undervoltage recovery mode can be configured to either automatically clear
Undervoltage fault [MTR_UNDER_VOLTAGE] or latch on Undervoltage fault. Overvoltage recovery
mode can be configured to either automatically clear Overvoltage fault [MTR_OVER_VOLTAGE] or
latch on Overvoltage fault.
4.3 Control configurations
4.3.1 Initial speed detection of the motor for reliable motor resynchronization
The Initial Speed Detection (ISD) function is used to identify the initial condition of the motor. It is important to
know the initial condition of the motor for reliable resynchronization. Motor resynchronization failures can occur
when the device attempts to start the motor while the motor is coasting or spinning in the direction opposite to
the intended direction of spin. Motors can coast in applications that require frequent motor starts and stops, or if
the motor Is being forced externally or if there is a power interruption. Motors can spin in the direction opposite to
the intended direction of spin if motor phase wires are connected to OUTA, OUTB and OUTC in wrong sequence
or when wrong direction command is issued. Motors with higher inertia coast for a longer period of time. It is
recommended to have ISD enabled in applications that require frequent motor starts and stops and use higher
inertia motors.
Step 1: Enable ISD [ISD_EN]
Step 2: Enable Motor ISD Resynchronize [RESYNC_EN]
Note
If the motor fails to startup, increase the Motor Stationary BEMF Threshold [STAT_DETECT_THR].
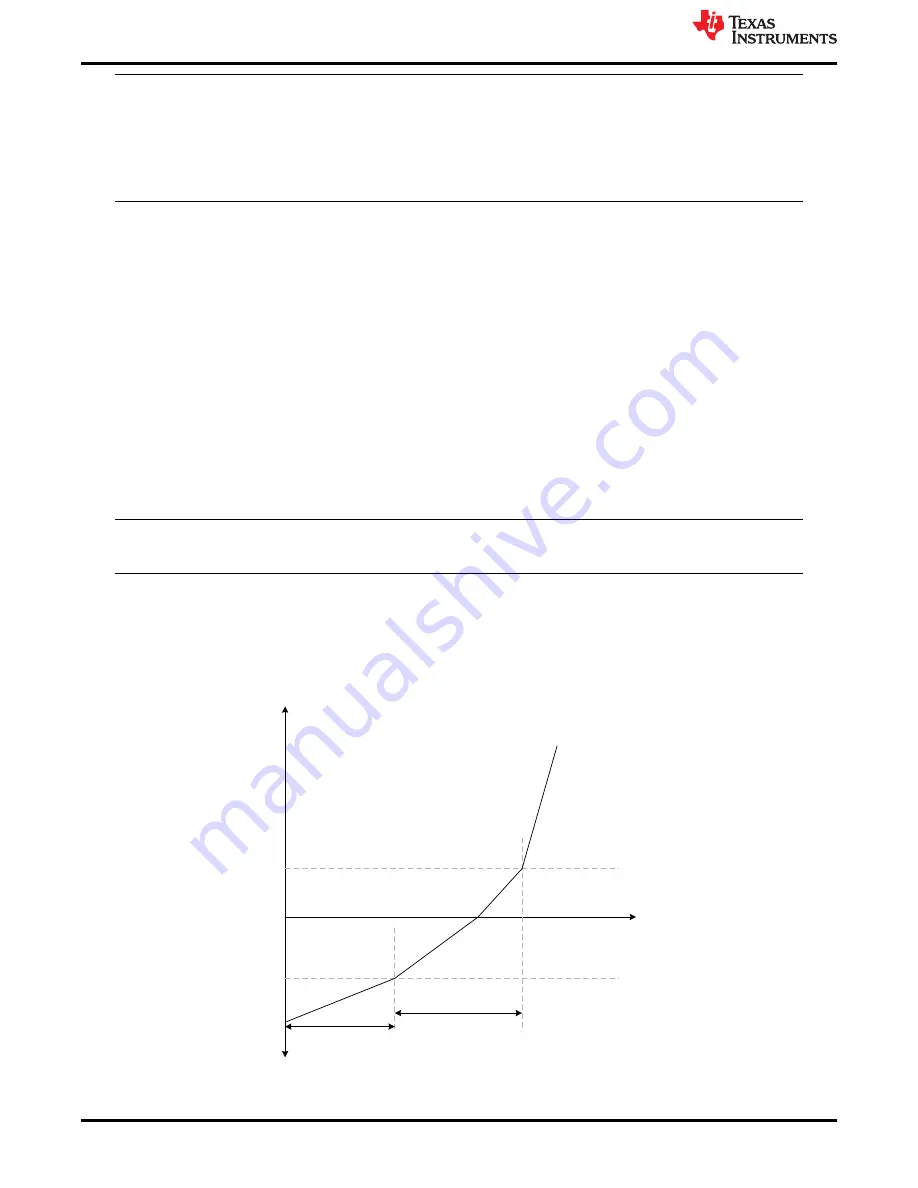
4.3.2 Unidirectional motor drive detecting backward spin
For applications that require spinning the motor in a specific direction, it is important to know if the motor is
coasting or spinning in the direction opposite to the intended direction of spin. MCT8316A reverse drive function
acts to reverse decelerate the motor through zero speed and to accelerate after changing direction until it
transitions into closed loop as shown in
Reverse Deceleration
Open Loop
Handoff to close loop
Open loop
Close loop
Speed
Time
Handoff to open loop
Figure 4-1. Reverse Drive Function
Basic Controls
14
MCT8316A Tuning Guide
SLLU336 – MAY 2021
Copyright © 2021 Texas Instruments Incorporated