

























40
Address
Parameter
Name & Function
Default Unit
Setting
Range RS232 RS485
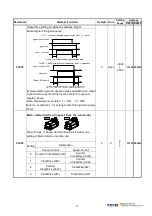
Automatic gain 1& 2 switch condition
(Acceleration Command)
Cn023
Set Cn015.1=2 first.
When accel. command is less than Cn023 Gain 1 is selected.
When accel. command is greater than Cn023 Gain 2 is selected.
When Gain 2 is active and acceleration command becomes less
than Cn023 system will automatically switch back to Gain 1 the
switch time delay can be set by Cn020.
* accel. is acceleration
0
rps/s
0
│
18750
53FH 0017H
Automatic gain 1& 2 switch condition (Position error value)
Cn024
Set Cn015.1=3 first.
When position error value is less than Cn024 Gain 1 is selected.
When position error value is greater than Cn024 Gain 2 is
selected.
When Gain 2 is active and position error value becomes less
than Cn024 system will automatically switch back to Gain 1 and
the switch time delay can be set by Cn020.
0
pulse
0
│
50000
540H 0018H
Load-Inertia ratio
Cn025
%
100
)
M
Inertia(J
MotorRotor
)
L
(J
×
=
aToMotor
LoadInerti
aRatio
LoadInerti
40
x0.1
0
│
1000
5FBH 0019H
Rigidity Setting
When Auto tuning is used, set the Rigidity Level depending on
the various Gain settings for applications such as those listed
below:
Explanation
Setting
Position Loop
Gain
Pn310 [1/s]
Speed Loop
Gain
Sn211 [Hz]
Speed Loop
Integral-Time
Constant
Sn212 [x0.2msec]
1
15
15
300
2
20
20
225
3
30
30
150
4
40
40
100
5
60
60
75
6
85
85
50
7
120
120
40
8
160
160
30
9
200
200
25
Cn026
A
250
250
20
4
X
1
│
A
C32H 001AH







































































