


















Technosoft 2019
4
iPOS80x0 BX-CAN/-CAT Technical Reference
Read This First
Whilst Technosoft believes that the information and guidance given in this manual is correct, all parties must
rely upon their own skill and judgment when making use of it. Technosoft does not assume any liability to anyone for
any loss or damage caused by any error or omission in the work, whether such error or omission is the result of
negligence or any other cause. Any and all such liability is disclaimed.
All rights reserved. No part or parts of this document may be reproduced or transmitted in any form or by any
means, electrical or mechanical including photocopying, recording or by any information-retrieval system without
permission in writing from Technosoft S.A.
The information in this document is subject to change without notice.
About This Manual
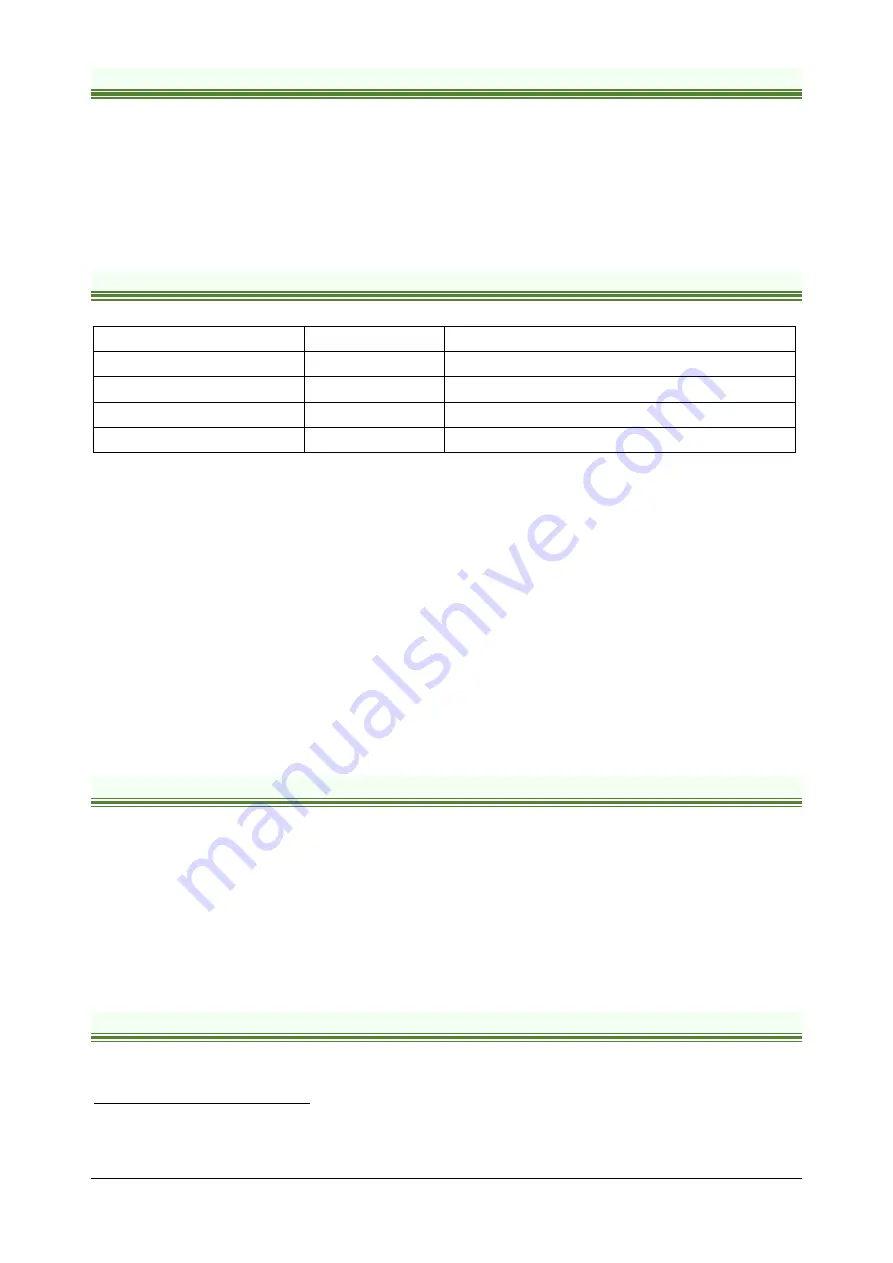
This book is a technical reference manual for:
Product Name
Part Number
Description
iPOS8010 BX-CAN
P029.025.E201
CAN version,10A In/ 20A I Peak, STO inputs
iPOS8020 BX-CAN
P029.026.E201
CAN version,20A In/ 40A I Peak, STO inputs
iPOS8010 BX-CAT
P029.025.E221
EtherCAT® version,10A In/ 20A I Peak, STO inputs
iPOS8020 BX-CAT
P029.026.E221
EtherCAT® version,20A In/ 40A I Peak, STO inputs
In order to operate the
iPOS80x0
drives, you need to pass through 3 steps:
Step 1
Hardware installation
Step 2
Drive setup
using Technosoft
EasySetUp
software for drive commissioning
Step 3
Motion programming
using one of the options:
A
CANopen master
EtherCAT® master
The drives
built-in motion controller
executing a Technosoft Motion Language (
TML
) program
developed using Technosoft
EasyMotion Studio
software
A
TML_LIB motion library for PCs
(Windows or Linux)
A
TML_LIB motion library for PLCs
3
A
distributed control
approach which combines the above options, like for example a host calling motion
functions programmed on the drives in TML
This manual covers
Step 1
in detail. It describes the
iPOS80x0
hardware including the technical data, the connectors
and the wiring diagrams needed for installation.
For Step 2 and 3, please consult the document
iPOS Dual Loop drives Software reference
( 091.027.DL.Software.xxxx)
. It also includes the scaling factors between the real SI units and the drive internal units.
For detailed information regarding the next steps, refer to the related documentation.
Notational Conventions
This document uses the following conventions:
•
iPOS80x0
– all products described in this manual
•
IU units
–
Internal units of the drive
•
SI units
–
International standard units (meter for length, seconds for time, etc.)
•
STO
– Safe Torque Off
•
TML
– Technosoft Motion Language
•
CANopen
– Standard communication protocol that uses 11-bit message identifiers over CAN-bus
•
TMLCAN
– Technosoft communication protocol for exchanging TML commands via CAN-bus, using
29bit message identifiers
•
CoE
– CAN application protocol over EtherCAT®
Trademarks
EtherCAT®
is registered trademark and patented technology, licensed by Beckhoff Automation GmbH,
Germany.
1
when the iPOS80x0 BX-CAN is set in CANopen mode
2
when using and iPOS80x0 BX-CAT
3
available only for CAN versions







































































