





























Programming with TAPPS2 / CAN bus
30
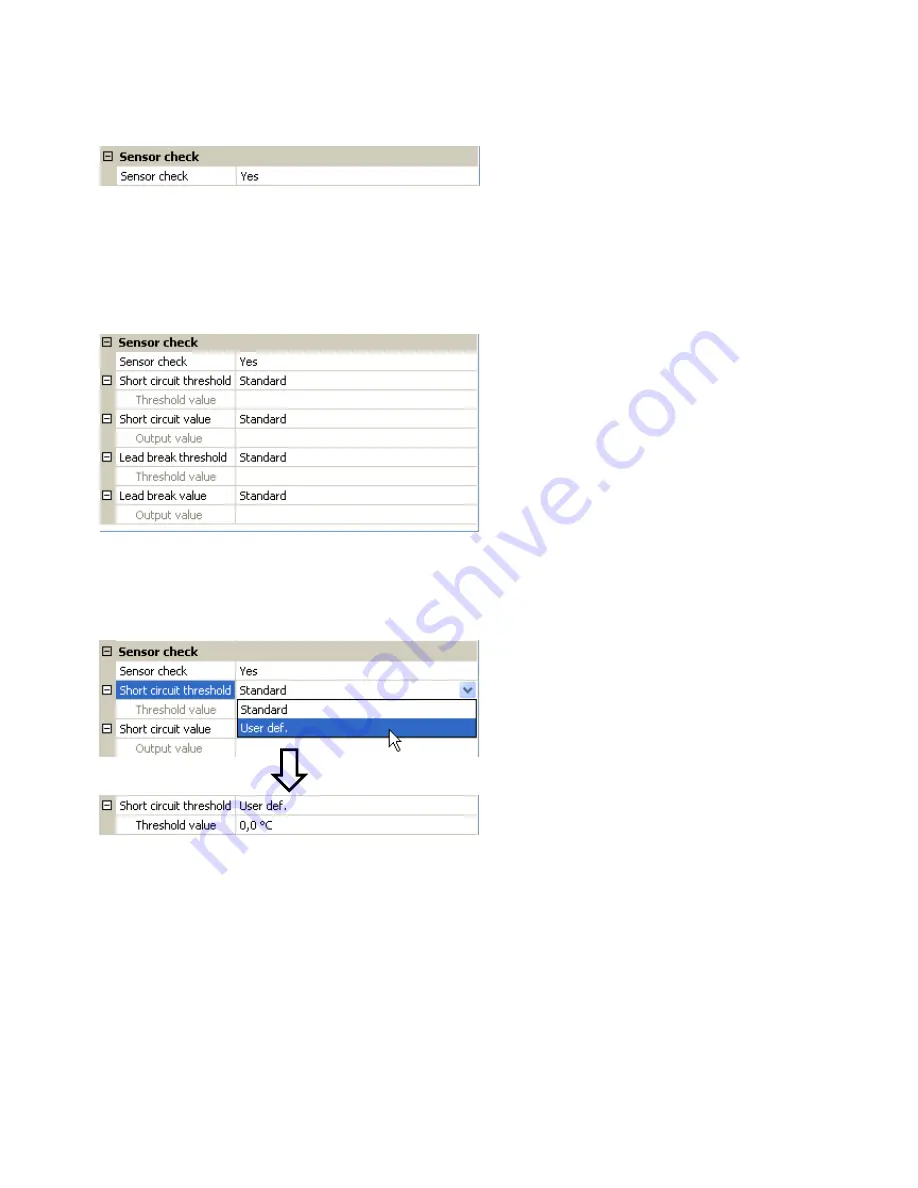
Sensor check
If you set the sensor check to "
Yes
", the
sensor error
of the sensor supplying the CAN input is
available as an input variable for a function.
Sensor error
This setting is only displayed if
sensor check is active
and
the measured variable is set to
"
User def.
".
If the "
Sensor check
" is active, the
sensor error
from a CAN input is available as a function input
variable: status "
No
" for a sensor that is working correctly and "
Yes
" for one that is faulty (short circuit
or lead break). This allows the controller to react to the failure of a sensor, for example.
If the
Standard
thresholds are selected, a short circuit will be indicated if the value falls below the
measurement limit
and a lead break will be indicated if the value exceeds the
measurement limit
.
The
Standard
values for temperature sensors are -9999.9 °C for a short circuit and 9999.9 °C for a
lead break. Those values are utilised in the internal calculations in the event of an error.
By selecting suitable thresholds and values for a short circuit or lead break, a fixed value can be
specified for the module in the event of sensor failure at the transmission node, to allow a function to
continue operating in emergency mode (fixed hysteresis: 1.0 °C).
The short circuit threshold must be defined below the lead break threshold.
In
System values
/ General, the sensor error is available for
all
inputs, CAN inputs and DL inputs.
CAN digital inputs
Up to 64 CAN digital inputs can be programmed. They are defined by specifying the
transmission
node number and the number of the
transmission
node's CAN output.
Their parameters are programmed in almost exactly the same way as for the CAN analogue inputs.
Under
Measured variable / User def.
the
display
for the CAN digital input can be changed from
OFF /
ON
to
No / Yes
and you can define whether the last status transmitted ("Unchanged") or a definable
substitute status should be issued if the timeout time is exceeded.





















































