
























11
7
9
145
96
141
58
142
143
144
BAG G
!
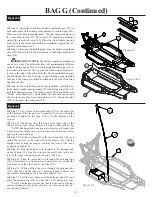
Step 1. Attach the motor
(not included)
to the motor plate (96)
using two 3mm x 8mm cap-head screws (141) and #4 washers
(58). Do not tighten the screws yet.
!
Step 2. Attach the pinion gear
(not included)
to the motor
shaft, adjust gear mesh and tighten the motor screws (141).
*NOTE: The gears need some backlash in order to function
properly.
!
Step 3. Locate the gear cover (142) and, if it isn't already
trimmed, cut the back side of it along the trim line as shown. If
not already present, drill two 1/8" mounting holes in the gear
cover (142) at the two locations marked with dimples.
!
Step 4. Place the trimmed gear cover (142) over the motor
plate (96) and secure it with two 4-40 x 1/8" button-head screws
(143) through the two open holes in the motor plate (96).
!
Step 5. Insert gear cover plug (144) into the large hole in the
gear cover (142).
2 5
Figure 54
Figure 55
Figure 55
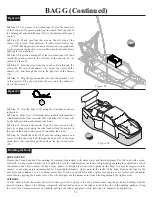
!
Step 6. Using Table 55B (on the following page), determine which
servo arm (145) is required for your servo. If your particular servo is
not listed, try using the arm recommended for
another servo made by the same manufacturer.
!
Step 7. Insert a 4-40 mini locknut (7) into the hex area of the servo
arm (145). Thread a 3/16" ball stud (11) through the hole in the arm
(145), into the locknut (7), and tighten.
!
Step 8. Plug the servo into the radio system’s receiver
(not in-
cluded)
. Make sure that there is power to the receiver, and turn the
transmitter on followed by the receiver. Be sure that the trim settings
for the steering on your transmitter are set to the center. With the
radio system still turned on, attach the servo arm (145) to the output
shaft so that the arm is one spline off center in the direction shown in
Figure 55A. Secure the arm (145) with the servo arm screw supplied
with the servo.
141
58
143
7
11
Figure 54
Figure 55A
Summary of Contents for XXX-T Matt Francis Edition
Page 2: ......







































































