


















46
TRIO MP-245A MICROMANIPULATOR SYSTEM QUICK REFERENCE – REV. 3.12B (20191001) (FW V3.12)
reception of return data so that the next command is sent
only after the move is complete. This delay can be auto
calculated by determining the distance of travel (difference
between current and target positions) and rate of travel.
This delay is not needed if polling for return data. In either
case, however, an appropriate timeout must be set for the
reception of data so that the I/O does not time out before the
move is made and/or the delay expires.
11.
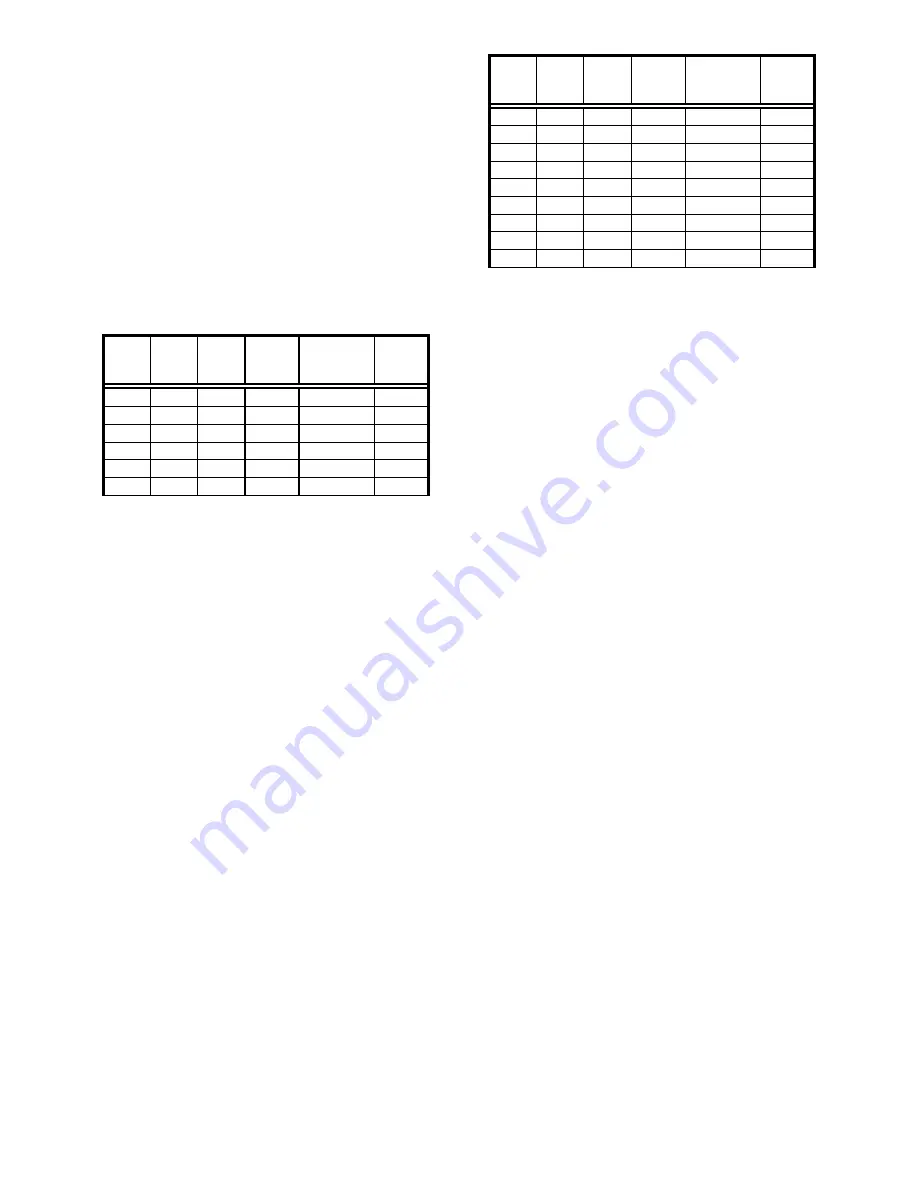
Movement Speeds: All move commands cause movement to
occur at a rate of 5,000 microns/second, except for the
“Straight-Line Move ‘S’ command which can be specified
with one of sixteen speeds. Actual speed for the “Straight-
Line Move ‘S’ command can be determined with the
following formula: (5000 / 16) * (sp +1), where 5,000 is the
maximum speed in microns/second and “sp” is the speed
level 0 (slowest) through 15 (fastest). For mm/second or
microns/millisecond, multiply result by 0.001.
Table D-7. Straight-Line Move ‘S’ Command Speeds.
Speed
Setting
mm/sec
or
µm/ms
µm/sec
or
nm/ms
nm/sec
in/sec
or
mil/ms
% of
Max.
15
5.0000 5000.0 5000000 0.196850394 100.00%
14
4.6875 4687.5 4687500 0.184547244 93.75%
13
4.3750 4375.0 4375000 0.172244094 87.50%
12
4.0625 4062.5 4062500 0.159940945 81.25%
11
3.7500 3750.0 3750000 0.147637795 75.00%
10
3.4375 3437.5 3437500 0.135334646 68.75%
Speed
Setting
mm/sec
or
µm/ms
µm/sec
or
nm/ms
nm/sec
in/sec
or
mil/ms
% of
Max.
9
3.1250 3125.0 3125000 0.123031496 62.50%
8
2.8125 2812.5 2812500 0.110728346 56.25%
7
2.5000 2500.0 2500000 0.098425197 50.00%
6
2.1875 2187.5 2187500 0.086122047 43.75%
5
1.8750 1875.0 1875000 0.073818898 37.50%
4
1.5625 1562.5 1562500 0.061515748 31.25%
3
1.2500 1250.0 1250000 0.049212598 25.00%
2
0.9375 0937.5 937500 0.036909449 18.75%
1
0.6250 0625.0 625000 0.024606299 12.50%
12.
Move Interruption: A command should be sent to the
controller for a manipulator only after the task of any
previous command is complete (i.e., the task-completion
terminator (CR) is returned associated). One exception is
the “Interrupt Move” (^C) command, which can be issued
while an ‘S’ command-initiated move is still in progress.
13.
Angle Setting & Movement: Although the set angle
command allows for a range of 0° to 90°, the effective range
that allows full movement is 1° to 89° (>0° and <90°). If 0°
or 90°, Z or X axis fails to move, causing single- and multi-
axis movement commands to fail. The ideal range for
smooth movement is 10° to 80°. Factory default is 30°.
NOTES:
Summary of Contents for TRIO MP-245A
Page 3: ......
Page 4: ......
Page 52: ...50 TRIO MP 245A MICROMANIPULATOR SYSTEM QUICK REFERENCE REV 3 12B 20191001 FW V3 12 NOTES...







































































