





























ID 442454.02
42
WE KEEP THINGS MOVING
Basic information
2
Operation manual CiA 402 Controller Based
2.3
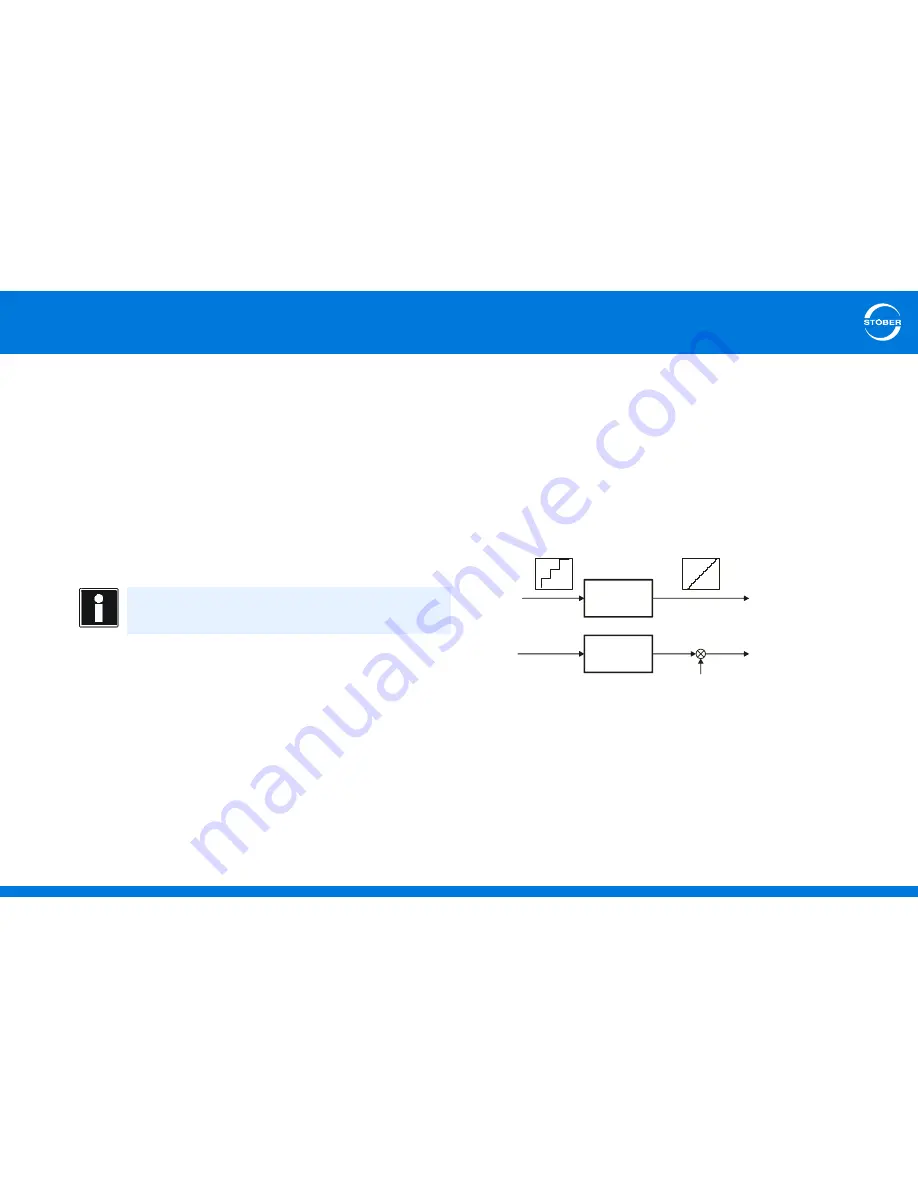
Feed forward
Feed forward relieves the load on the position controller, thereby reducing the
following error.
You can implement feed forward with the following operating modes:
•
Interpolated position mode
•
cyclic synchronous position mode
You can select different settings:
•
With control-unit-generated (external) feed forward
•
With drive-generated (internal) feed forward
•
Without feed forward
Moving with feed forward is preferable.
If your control unit calculates speed reference values, you should use them. If
your control unit only calculates position reference values, you can make use
of drive-controlled feed forward.
You may have to determine the optimum feed forward value for your system
using an iterative procedure. To optimize control response, you should in any
case consult the drive controller manual.
2.3.1
Control-unit-generated external feed forward
Use control-unit-generated external feed forward if you want to change the
feed forward during operation to achieve optimization of movement.
Setting up external feed forward in DriveControlSuite
•
Set
I25 Velocity feed forward
to a value that is suitable for your application,
e. g. to 80 %.
•
Activate external feed forward with
I425
=
1: external - linear v+x
or
3:
external - quadratic x
.
•
The control unit transfers
A601 Interpolation data record
and
A592 Velocity
offset
.
Information
For multiple-axis movements, feed forward close to 100% is
necessary for the most accurate trajectory possible.
I25
Interpolation
2
Interpolation
1
X
soll cycl
X
soll
V
soll
V
soll cycl





















































