





























Operation
20221495F
39
Note !
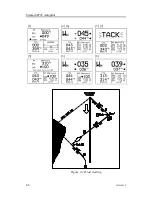
If the required course change is more than the NAV change limit
(default 10
°
), you have to verify that the upcoming course
change is acceptable. This is a safety feature. See page 124 on
how to change the ‘NAV change limit’.
Alert screen. Press NAV button to
verify course change larger than 10°.
If no verification is received, the
AP25 will continue on the current
set course in AUTO mode.
Regain manual steering by pressing the
STBY
button
Setting the waypoint arrival circle
For route navigation it is recommended to use automatic
waypoint shift/change at a set waypoint arrival circle.
The arrival circle should be adjusted according to boat speed.
The higher speed, the wider circle. The intention is to make the
autopilot start the heading change in due time to make a smooth
turn onto the next leg.
The figure below may be used to select the appropriate waypoint
circle on the GPS/chart plotter.
Summary of Contents for AP25
Page 1: ...MANUAL SIMRAD AP25 Autopilot 20221495F Sw 1 3 English ...
Page 2: ......
Page 48: ...Simrad AP25 Autopilot 46 20221495F 1 2 4 3 7 5 6 8 Figure 2 2 Wind steering ...
Page 66: ...Simrad AP25 Autopilot 64 20221495F This page is intentionally left blank ...
Page 140: ...Simrad AP25 Autopilot 138 20221495F This page is intentionally left blank ...
Page 172: ...Simrad AP25 Autopilot 170 20221495F wind vane steering 41 Z zigzag turn 27 55 ...







































































