


























Installation
20221495F
79
On
-Of
f
Vs
ys
+
AUTOPILOT COMPUTER
MAIN PCB
ROBNET
Bus
+
Vs
ys
Wh
Bn
Bus
Pnk Gry Yel
AP25
CONTROL UNIT
REAR VIEW
TB15
J4
J2
J1
J3
Connect to
any of the two
Robnet2
connectors
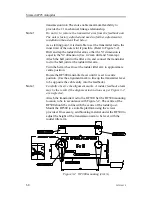
Figure 3-11 Control unit connection
J1 and J2 (top) are Robnet2 connectors. J3 and J4 are SimNet
connectors.
AP27 connection
If a Simrad AP27 is part of the system, use the JP27 Jack Point
and connect as shown on Figure 3-9. Alternatively cut the
connector from the cable and connect the wires in parallel with
the cable shown on Figure 3-11 using the same color code.
Note !
The AP27 cable contains an air-breathing tube. Check that the
tube is open after you have cut the cable.
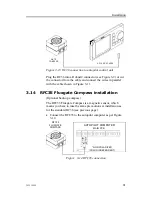
3.13
RC36 Rate Compass installation
Figure 3-12
RC36 mounting
The heading sensor is the most important part of the AP25
system and great care should be taken when deciding the
Summary of Contents for AP25
Page 1: ...MANUAL SIMRAD AP25 Autopilot 20221495F Sw 1 3 English ...
Page 2: ......
Page 48: ...Simrad AP25 Autopilot 46 20221495F 1 2 4 3 7 5 6 8 Figure 2 2 Wind steering ...
Page 66: ...Simrad AP25 Autopilot 64 20221495F This page is intentionally left blank ...
Page 140: ...Simrad AP25 Autopilot 138 20221495F This page is intentionally left blank ...
Page 172: ...Simrad AP25 Autopilot 170 20221495F wind vane steering 41 Z zigzag turn 27 55 ...







































































