





























04.97
Programming of Traversing Blocks
4.10.3 Collision monitoring - Example
Programming:
N10 G77 X100.000 Y100.000 FX1000.00 FY1000.00
N20 G96 X200.000 Y200.000
N30 G01 X300.000 Y300.000 F1000.00
N40 XY400.000
N50 G97 X500.000 Y500.000
N10
N20
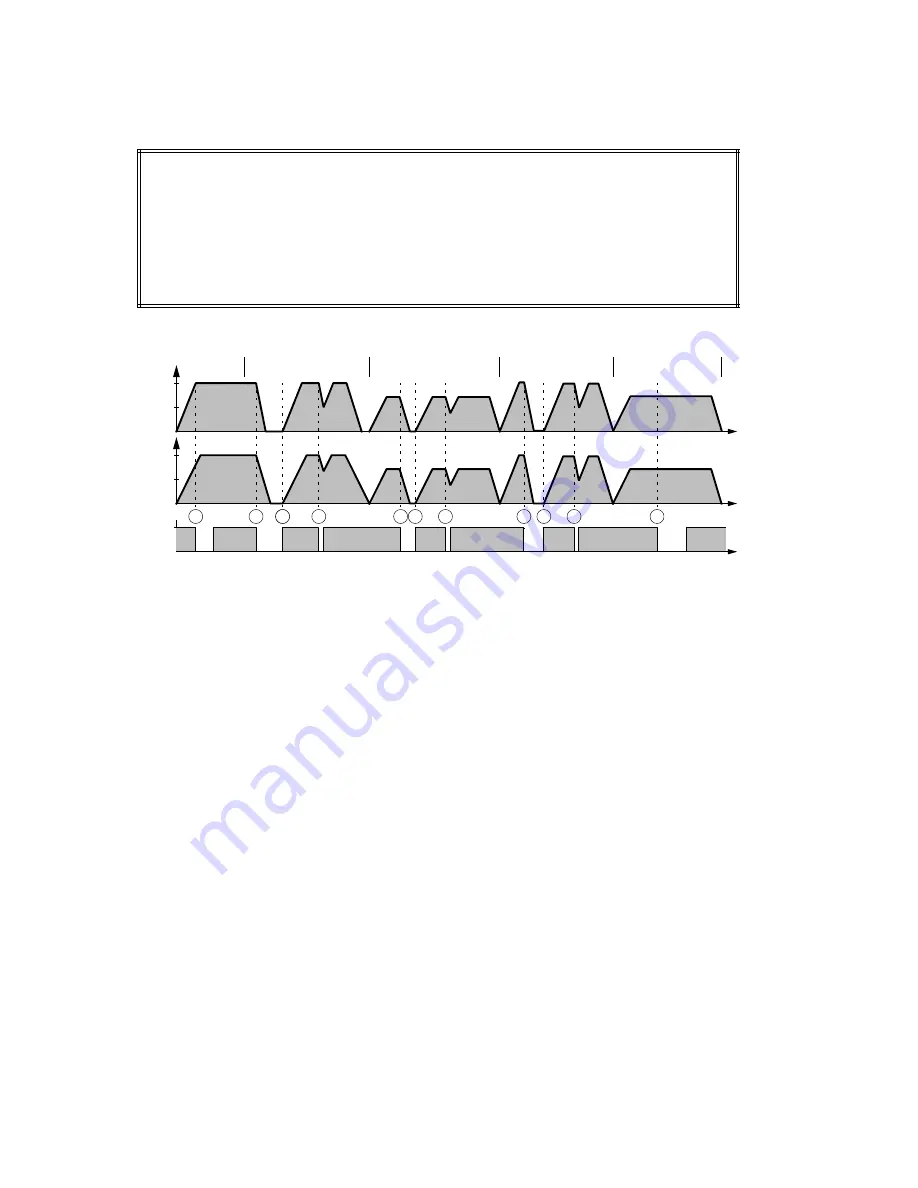
v-t diagrams:
N30
V
x
1000
V
y
E
N50
1000
1
t
t
t
0
N40
a a
a a
a a
a a
a a
1
a a a
a a a
a a a
a a a
a a a
2
a a
a a
a a
a a
a a
2
a a
a a
a a
a a
a a
3
a a
a a
a a
a a
a a
4
a a
a a
a a
a a
a a
5
a a
a a
a a
a a
a a
6
a a a
a a a
a a a
a a a
a a a
7
a a
a a
a a
a a
a a
9
a a a
a a a
a a a
a a a
a a a
10
a a a
a a a
a a a
a a a
a a a
11
a a
a a
a a
a a
a a
8
➀
As in N10, the collision monitoring is not yet active, the removal of the rapid input does not
stop the axes.
➁
In N20, the collision monitoring is activated with G96. As chaining is active, the removal of
the rapid input stops the axes with the "deceleration at collision" specified for the
respective axis.
➂
Upon selection of the rapid input, the axes are accelerated with the acceleration values
(MD 27).
➃
If the rapid input is removed for a short time only, the axes will be braked with
"deceleration at collision". Then, traversing will be continued with the acceleration values
(MD 27).
➄
In N30, the interpolation is switched on. When the rapid input is removed, the axes stop,
observing the interpolation conditions (the contour must not be left), i.e. the "deceleration
at collision" of the "weaker" axis (lower deceleration value) is taken into consideration as
the maximally admissible deceleration (in this case axis Y).
➅
Upon selection of the rapid input, the axes are accelerated with the acceleration values
(MD 27).
➆
If the rapid input is removed for a short time only, the axes will be braked with the
"deceleration at collision" of the "weaker" axis, observing the interpolation conditions.
Then, traversing will be continued with the acceleration values (MD 27).
©
Siemens AG 1997 All Rights Reserved 6ZB5 440-0VU02
4 – 17
WF 723 C (Programming Guide)







































































