





























Positioning
IP 240
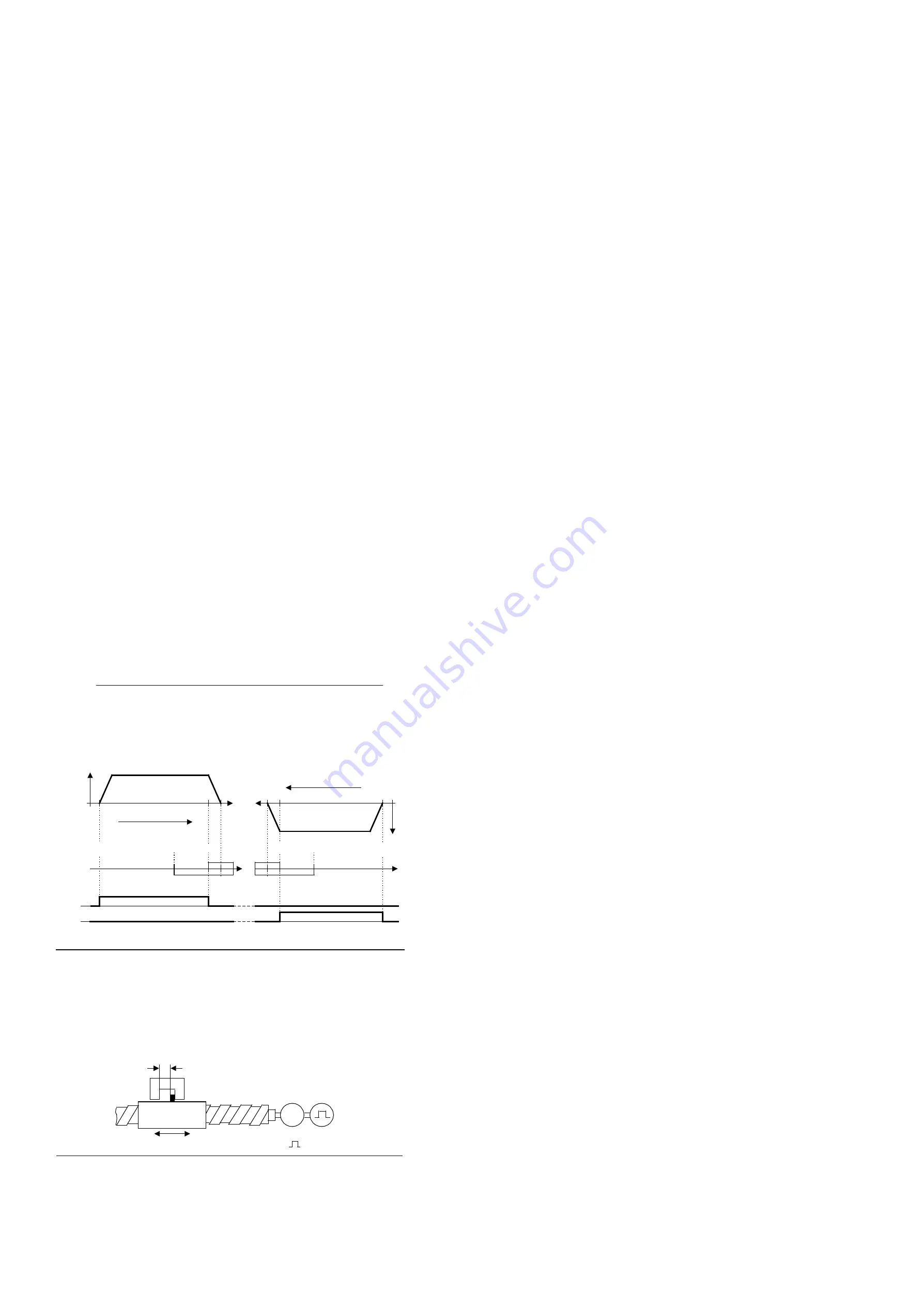
b) The IP outputs control the direction of travel
The IP 240 sets one or both outputs in dependence on the required direction of travel.
D1 is set if travel in positive direction is required.
D2 is set if travel in negative direction is required.
The drive is switched off when the BEE2 range is entered.
Fig. 10-7. IP Outputs Control the Direction of Travel
Direction of travel
v
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
Direction of travel
a a a a a a a a a a
a a a a a a a a a a
a a a a a a a a a a
a a a a a a a a a a
a a a a a a a a a a
a a a a a a a a a a
BEE1
-v
a) Approaching the target position in
positive direction
Out-
put
D1
D2
b) Approaching the target position in
negative direction
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
a a a a a a
Target
position
Target
position
Selection of the
target position
Actual
value
a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a
BEE1
BEE2
Selection of the
target position
BEE2
Two additional PLC digital outputs are required to control a drive with two speeds and two
directions. These two outputs must be driven by the S5 CPU in dependence on status bit BEE1 for
changing the speed or status bit RICH for controlling the direction.
Backlash compensation
Play in the drive system is referred to as backlash. Each time the direction is reversed, this backlash
causes the motor to rotate without changing the position of the axis. If the position encoder is
connected to the motor shaft, the result is a reduction in positioning accuracy.
Fig. 10-8. Backlash
a a a a a a a a a
a a a a a a a a a
a a a a a a a a a
a a a a a a a a a
a a a a a a a a a
Backlash
a a a a a
a a a a a
a a a a a
a a a a a
a a a a a
M
a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a
a a a a a a a a a a a a a a a a a a a a a a a a
: Incremental encoder
a a a a a a a a a a a
a a a a a a a a a a a
a a a a a a a a a a a
a a a a a a a a a a a
a a a a a a a a a a a
M : Motor
10-8
EWA 4NEB 811 6120-02a







































































