





























Chapter 3 - Start-up Information
Wizards
23 | 180
Siemens Industry, Inc.
Siemens BT300 HVAC Drive
DPD01809
Building Technologies
2016-06-07
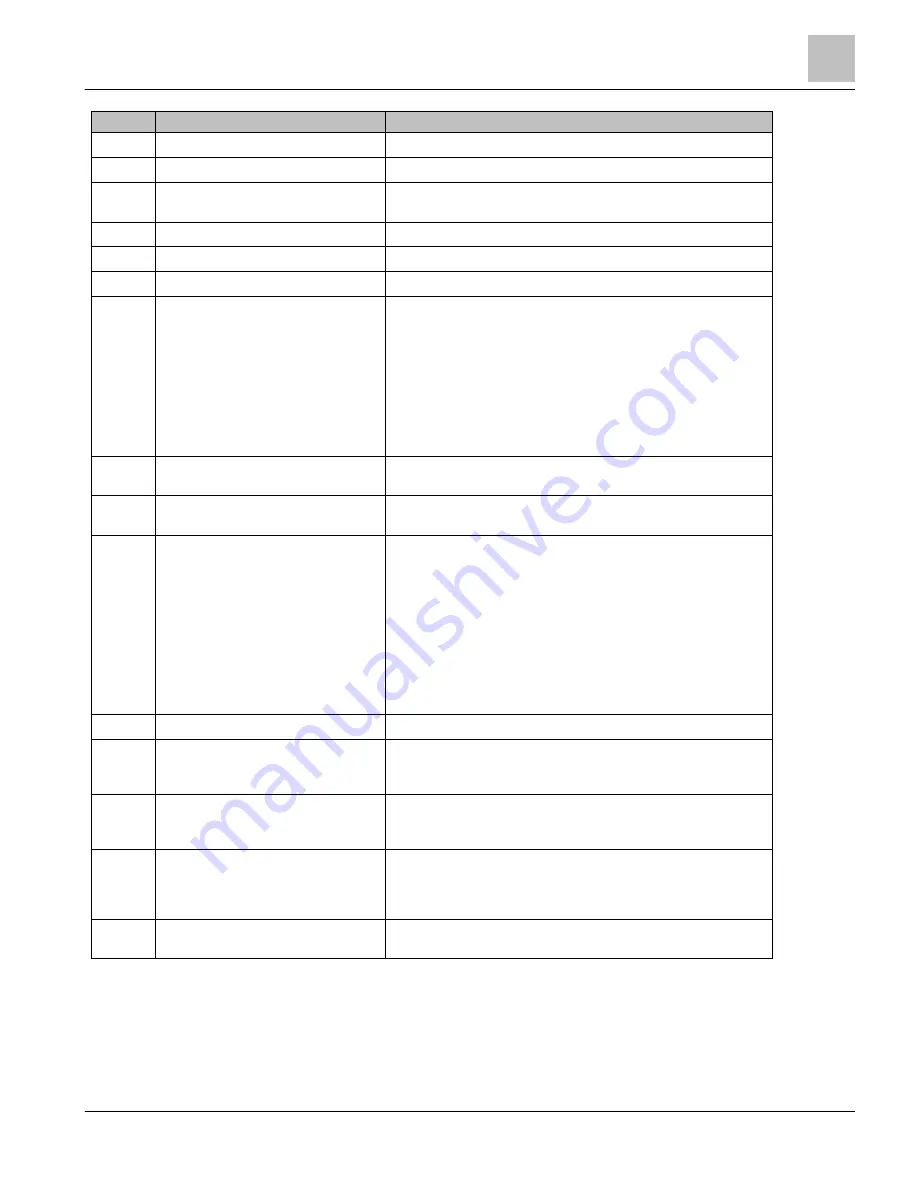
Step
Parameter/Question
Settings
10
Motor Nom Speed (P3.1.1.3)
Defines nominal motor speed from motor nameplate data.
11
Motor Nom Currnt (P3.1.1.4)
Defines nominal motor current from motor nameplate data.
12
Motor Cos Phi (P3.1.1.5)
(Power Factor)
Defines nominal motor Cos Phi (power factor) from motor nameplate
data.
13
Motor Nom Power (P3.1.1.6)
Defines nominal motor power from motor nameplate data.
14
Min Frequency (P3.3.1)
Minimum allowed frequency reference.
15
Max Frequency (P3.3.2)
Maximum allowed frequency reference.
16
I/O Ctrl Ref (P3.3.3)
Selects location of frequency setpoint source when in I/O A control. In
the following list of possible settings, the main setpoint is selected:
1= Preset Freq 0
2 = Keypad Reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID 1 Reference
8 = Motor Potentiometer
17
Accel Time (P3.4.2)
Defines the time required to increase output frequency from 0 to Max
Frequency (P3.3.1).
18
Decel Time (P3.4.3)
Defines the time required to decrease output frequency from Max
Frequency (P3.3.1) to 0 frequency.
19
Ctrl Place Auto (P3.2.1)
Start/Stop commands are given differently depending upon the control
place. This parameter defines whether the Start/Stop command is
controlled by digital inputs as defined in Control Signal 1 A (P3.5.1.1)
and Control Signal 2 A (P3.5.1.2) in accordance with the I/O A
Start/Stop Logic (P3.2.6) or if the Start/Stop command is controlled by
the Fieldbus that is in use.
Settings:
0 = I/O Control (control is from the physical I/O, PID control, or time
channels)
1 = Fieldbus (control is from the configured fieldbus found in Ethernet
or RS-485 settings).
20
Automatic Reset (P3.10.1)
Determines if the Automatic Reset feature can be used.
21
Start Function (P3.2.4)
Defines the start function of the drive.
0 = Ramping Start
1 = Flying Start
22
Stop Function (P3.2.5)
Defines the stop function of the drive.
0 = Coast to Stop
1 = Ramping Stop
23
Motor Switch (P3.1.2.2)
Prevents the drive from tripping when a motor switch is located
between the drive and motor.
0 = No
1 = Yes
24
Bypass Wizard (P1.21)
Enable parameter for the Bypass Wizard. This wizard can be activated
during the Startup Wizard.
The Startup Wizard is now complete.
Summary of Contents for BT300 LonWorks
Page 1: ...Siemens BT300 HVAC Drive Operator s Manual DPD01809 Building Technologies 2016 06 07 ...
Page 8: ......
Page 179: ......







































































