200
(7.87)
160
(6.3)
120
(4.72)
80
(3.15)
40
(1.57)
0
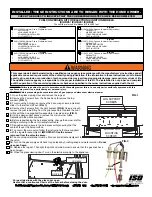
Min. distance from object to background in mm (inch)
0
1,000
(39.37)
2,000
(78.74)
3,000
(119.11)
Distance in mm (inch)
1
2
3
5
4
Figure: H-1 - Small teach and analog 6%/90%
1
6%/90% AVG1
2
6%/90% AVG4
3
6%/90% AVG16
4
6%/90% AVG64
5
6%/90% AVG256
180
(7.09)
160
(6.03)
120
(4.72)
80
(3.15)
40
(1.57)
140
(5.51)
100
(3.94)
60
(2.36)
20
(0.79)
0
Min. distance from object to background in mm (inch)
0
1,000
(39.37)
2,000
(78.74)
3,000
(118.11)
Distance in mm (inch)
1
2
3
4
5
Figure: H-2 - Small teach and analog 90%/90%
1
90%/90% AVG1
2
90%/90% AVG4
3
90%/90% AVG16
4
90%/90% AVG64
5
90%/90% AVG256
3.2
Mounting
Mount the sensor using a suitable mounting bracket (see the SICK range of acces‐
sories).
Note the sensor's maximum permissible tightening torque of 0.8 Nm.
Note the preferred direction of the object relative to the sensor [F].
3.3
Electronics
The sensors must be connected in a voltage-free state (U
V
= 0 V). The information in
the graphics [B] must be observed, depending on the connection type:
–
Male connector connection: pin assignment
–
Cable: wire color
+(L+)
–(M)
Q2
Q1
Q3/MF
in
brn
wht
blk
gra
blu
Figure: B - WTT190L-K15x4
+(L+)
–(M)
Q2
Q1
Q3/MF
in
brn
wht
blk
gra
blu
1
2
3
4
5
Figure: B-2 - -K35x4
Q1
4
+(L+)
–(M)
Q2/MF
in
brn
wht
blk
blu
1
2
3
Figure: B-3 - K22x3
Only apply voltage/switch on the voltage supply (U
V
> 0 V) once all electrical connec‐
tions have been established. The green LED indicator lights up on the sensor.
Explanations of the connection diagram (Graphic B):
MF
in
= multifunctional, programmable input.
3
COMMISSIONING
6
8020034.17U4 | SICK
Subject to change without notice