





























60
Manual – MOVI-PLC® Application Solution "SyncCrane"
6
Positioning mode – unsynchronized
Operation
6.5
Positioning mode – unsynchronized
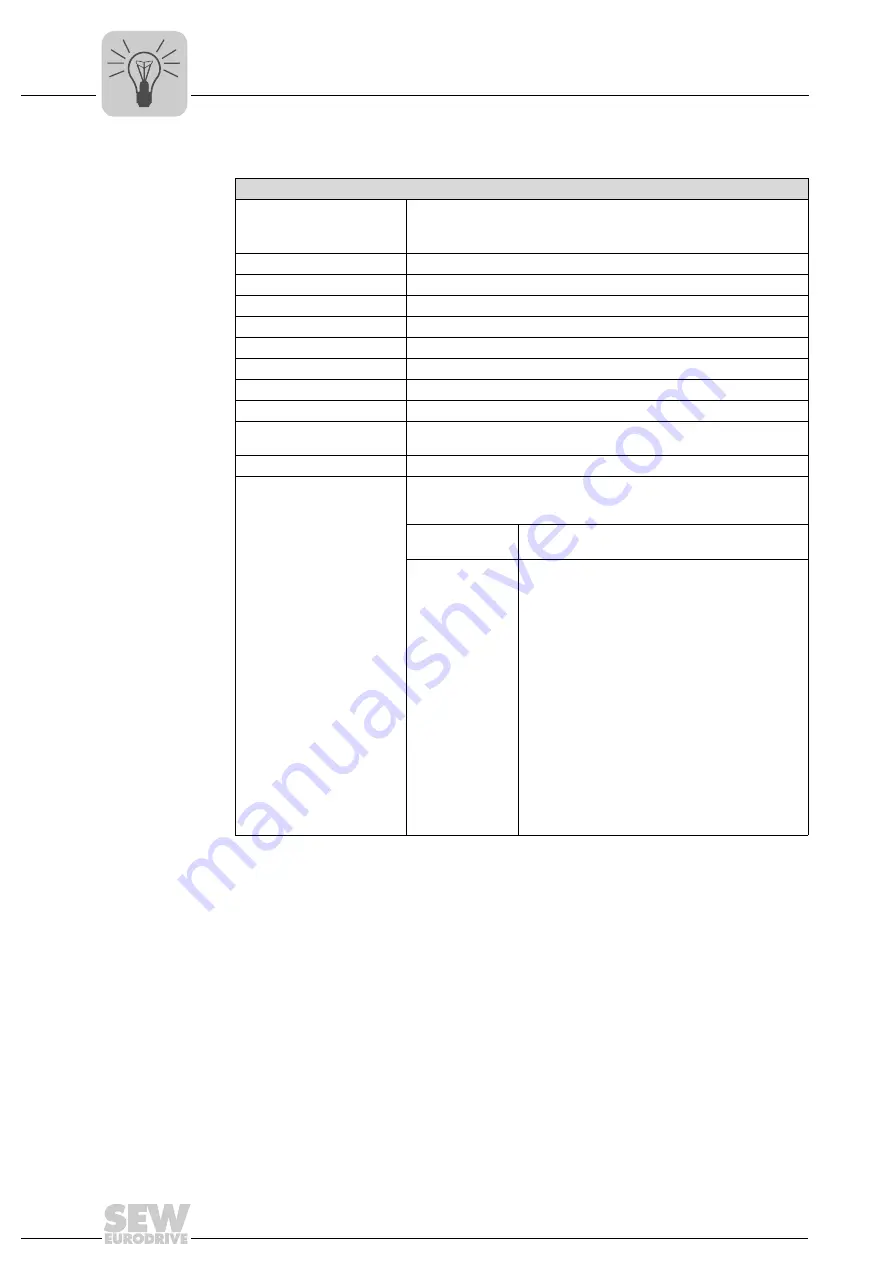
Interface description
Mode selection
PO1:Bit11 = TRUE
PO1:Bit12 = TRUE
PO1:Bit13 = FALSE
Start referencing
PO1:8
Disable SWLS
PO1:15
Axis number
PO3 Broadcast 99 or single axis mode 1 ... 12
Position setpoint
PO4 and PO5 in [inc]
Velocity specification
PO8
Velocity limit
Startup parameter
Overlapping
Startup parameter
Position limiting
Software limit switch startup parameter
Ramp specification
•
PO9 acceleration ramp
•
PO10 deceleration ramp
Jerk limitation
–
Brief description
Movement takes place to the specified target position when the setpoint
position is selected and start is set. It is possible to move an individual
axis (PO3 1 ... 12) or the entire axis system (PO3 = 99).
Prerequisite
•
Operating mode is selected
•
Drive is enabled
Functional
description
The positioning sequence is started using bit PO1:8
Start.
The user specifies the absolute target position via
fieldbus.
Speed and ramp times are adopted from the
specified process data words and compared to the
limitations from the startup.
The position specification can be changed during
ongoing operation. When the drive reaches the
target position, it stops with position control and
sends back the “In position” signal by setting bit
PO1:3.
If software limit switches are defined, the target
position will be checked cyclically for plausibility. If a
position is specified, which lies outside the software
limit switch range, a fault message will be issued
and the ongoing movement will be stopped. This
monitoring function can be deactivated with the input
bit Disable SWLS.
Summary of Contents for MOVI-PLC
Page 2: ...SEW EURODRIVE Driving the world ...
Page 105: ......
Page 106: ......
Page 107: ...SEW EURODRIVE Driving the world ...