

























LEVY
LEVY User Manual - Rev. First Edition: 1.0 - Last Edition: 1.0 - Author: S.O. - Reviewed by N.P. - Copyright © 2022 SECO S.p.A.
41
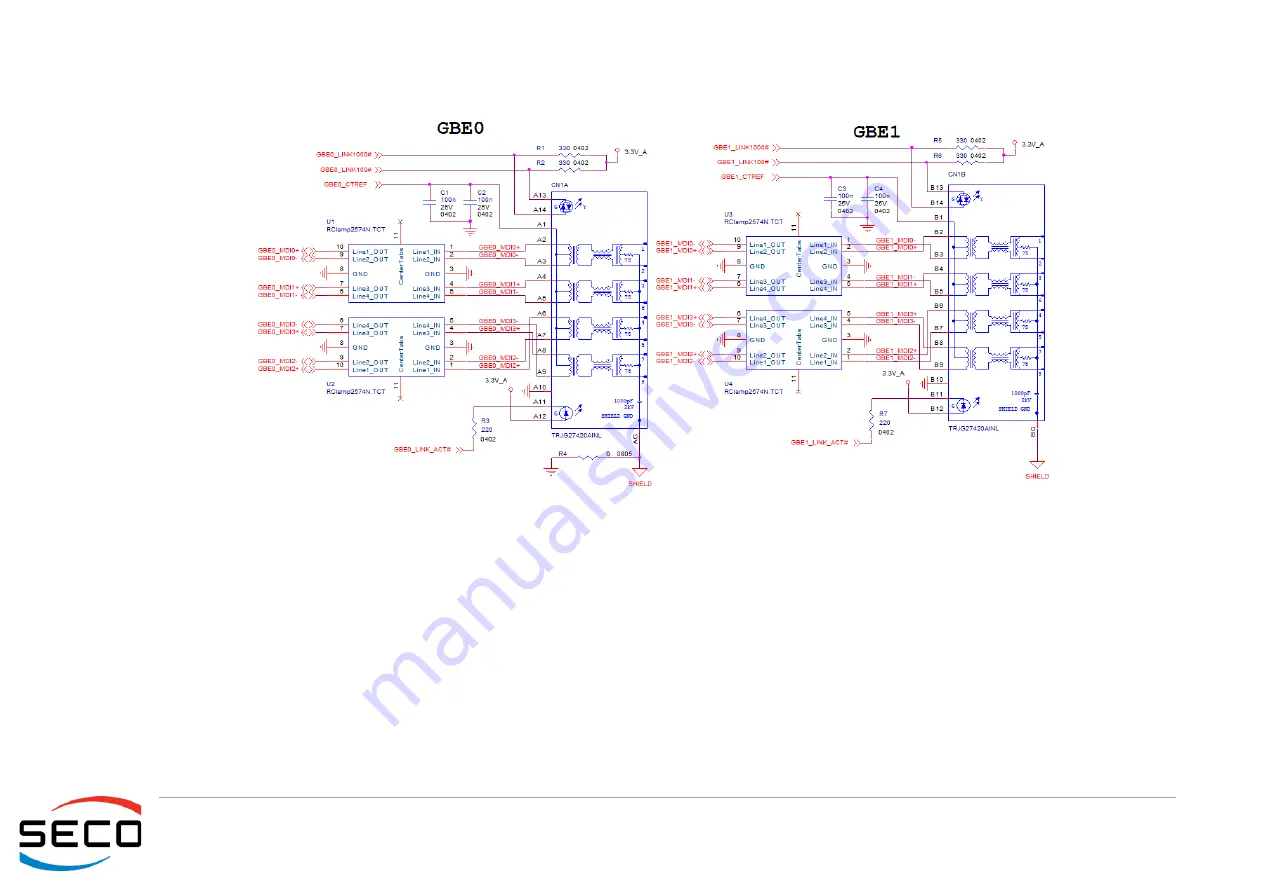
Please notice that if just a FastEthernet (i.e. 10/100 Mbps) is needed, then only MDI0 and MDI1 differential lanes are necessary, for both Gigabit Ethernet interfaces
3.2.2.13
CAN interface signals
Two available CAN interfaces signals are directly managed by the i.MX 8M Plus processor.
CAN0_TX: CAN Transmit Output for CAN Bus Channel 0. +1.8V_RUN electrical voltage level signal with a 2k2
Ω
pull-up resistor
CAN0_RX: CAN Receive Input for CAN Bus Channel 0. +1.8V_RUN electrical voltage level signal with a 2k2
Ω
pull-up resistor
CAN1_TX: CAN Transmit Output for CAN Bus Channel 1. +1.8V_RUN electrical voltage level signal with a 2k2
Ω
pull-up resistor
CAN1_RX: CAN Receive Input for CAN Bus Channel 1. +1.8V_RUN electrical voltage level signal with a 2k2
Ω
pull-up resistor
Please consider that it is not possible to connect the SMARC CAN interface to any CAN Bus directly, it is necessary to integrate a CAN Bus Transceiver in the Carrier
board.
3.2.2.14
Watchdog
WDT_TIME_OUT#: Watchdog timer Output. +1.8V_RUN electrical level







































































