










R60-IO
User Manual
-6-
szruitech.com
3.4 Control signal connection
3.4.1
IN Port: connection for pulse command
The upper controller can be the pulse signal generating device, such as PLC, MCU, control card and
controller.
The pulse level that R60-IO drive can be used: 3.3V-24V (
no need to connect resistor
)
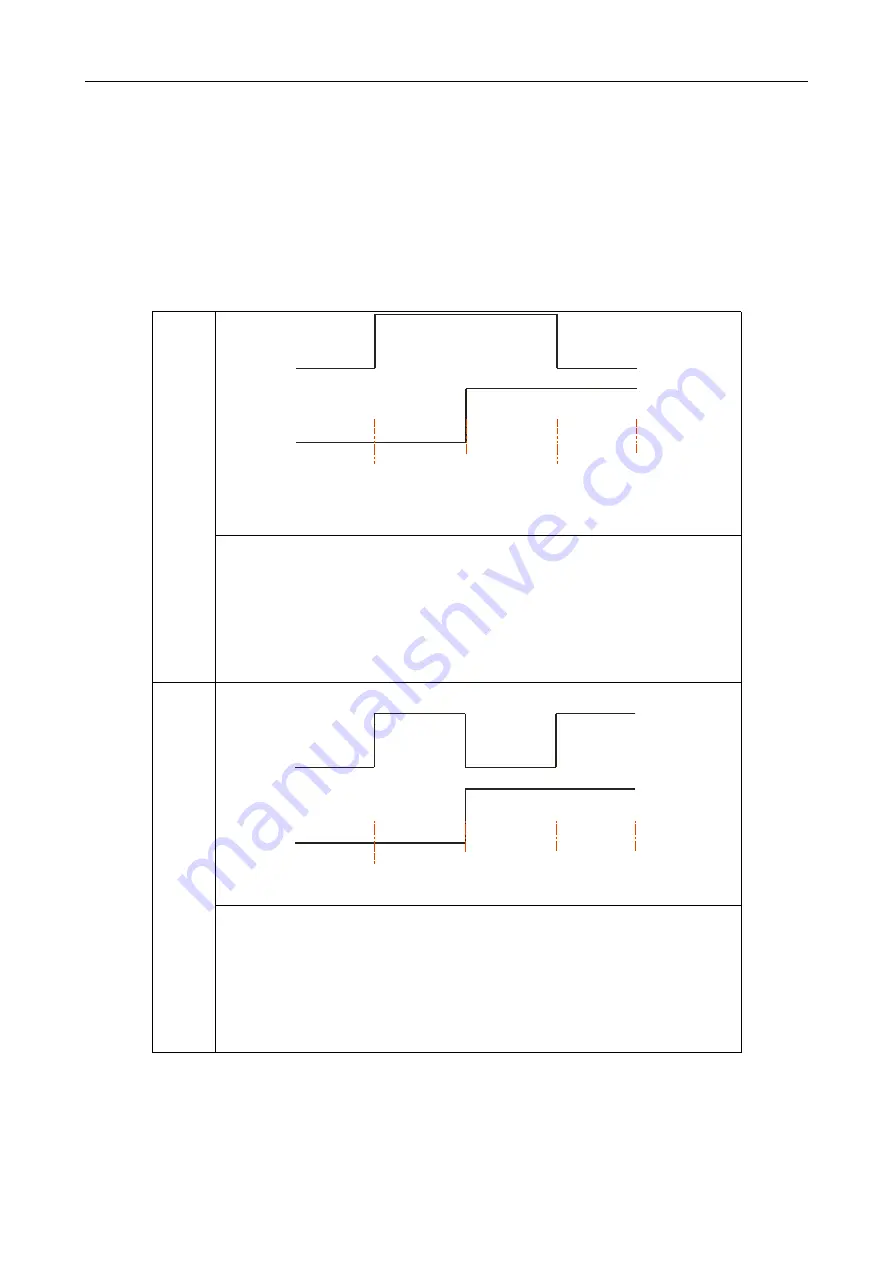
S
p
e
e
d
m
o
d
e
1
In1
In2
不 转
正 转
反 转
不 转
When IN1 is turned on and IN2 is turned off, the motor is triggered to rotate
forward; when IN1 is turned off, the motor decelerates to stop.
When IN1 is turned on and IN2 is turned on, the motor is reversed. When IN1 is
turned off, the motor decelerates to a stop.
When IN1 is off, the motor stops running.
(default is this mode)
S
p
e
e
d
m
o
d
2
In1
In2
不 转
正 转
反 转
不 转
When IN1 is turned on, the motor is triggered to continue to rotate forward;
when it turns from on to off, the motor decelerates and stops.
When IN2 is turned on, the motor is triggered to continuously reverse; when it
turns from on to off, the motor decelerates and stops.
When IN1 and IN2 are both on, the motor will stop running.
Note: The IO driver defaults to mode 1. If you need to adjust, please explain to Rtelligent.
3.4.2
ENA port: used to enable or disable.
By default, the driver outputs current to the motor when the photocoupler is turned off. When the
Do not turn
Forward
Reverse
Do not turn
Reverse
Do not turn
Forward
Do not turn







































































