





























Robotiq 2-Finger Adaptive Robot Gripper - 200
Instruction Manual
Robotiq inc. © 2008-2013
66
4.10 MODBUS TCP-IP communication protocol
The Robotiq 2-Finger Adaptive Robot Gripper – 200 can be controlled using the Modbus TCP/IP protocol (note that
this is an option). This section is intended to provide guidelines for setting up a Modbus TCP/IP communication to
adequately send commands and read input from the Gripper.
For a general introduction to Modbus TCP/IP and to understand its differences from Modbus RTU, the reader is
invited to read the information provided on the following website:
http://www.simplymodbus.ca/TCP.htm
4.10.1 Connection Setup
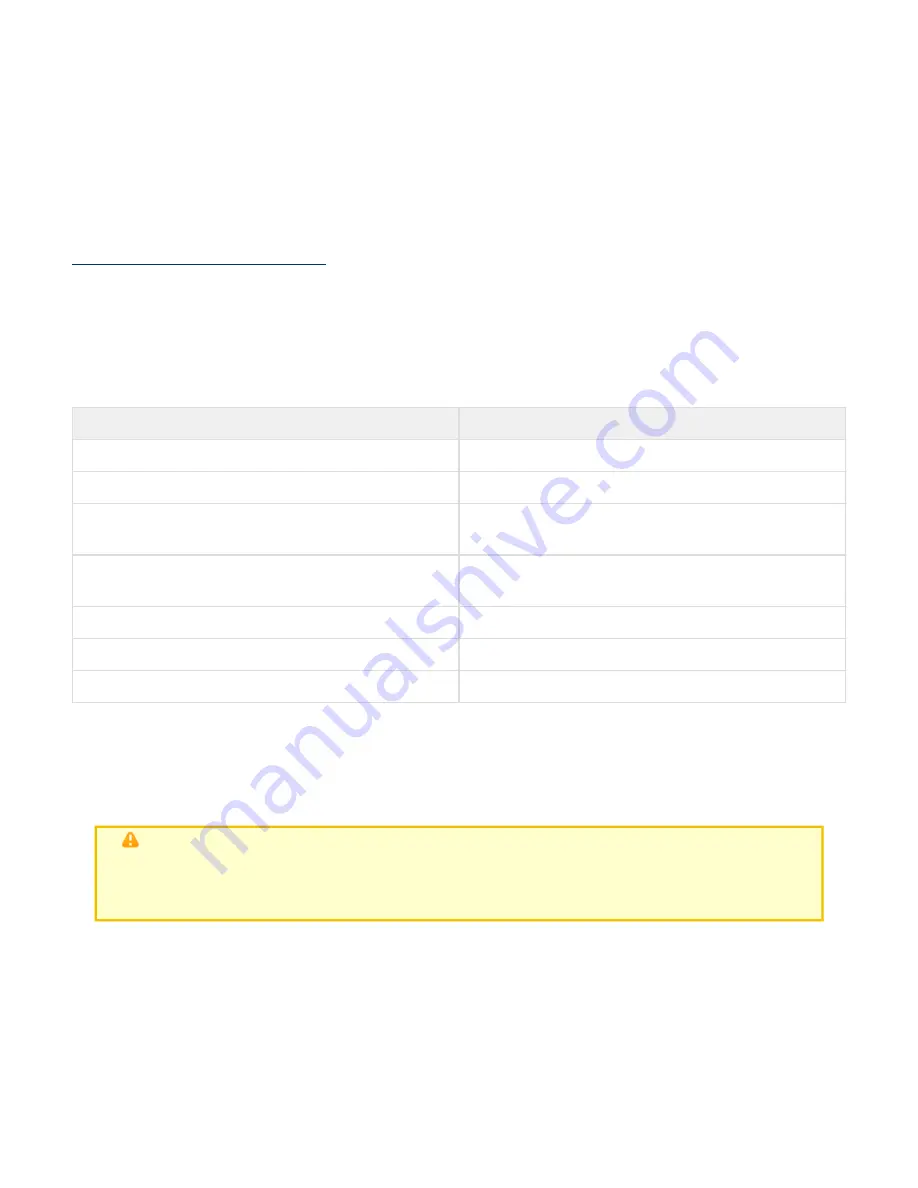
The following table describes the connection requirements for controlling the Gripper using the Modbus TCP/IP
protocol.
Connection requirement
Value
Required protocol
Modbus TCP/IP
Port
502
Gripper IP address
Configurable (most Grippers are shipped with the
192.168.1.X address)
Supported Functions
Read Input Registers (FC04)
Preset Multiple Registers (FC16)
UnitID
0x0002 (2)
Robot Output / Gripper Input First Register
0x0000 (0000)
Robot Input / Gripper Output First Register
0x0000 (0000)
Each register (word - 16 bits) of the Modbus TCP/IP protocol is composed of registers (bytes – 8 bits) from the
2
Gripper. The first Gripper output Modbus register (0x0000) is composed from the first Robotiq 2-Finger Adaptive
2
Robot Gripper – 200 registers (byte 0 and byte 1).
Caution
For safety reasons, communication with the Gripper must stay open during operation, shutting
down communication will stop the Gripper.































































