
























page 40 / 85 0MLMHTM16RUENUB
4.11
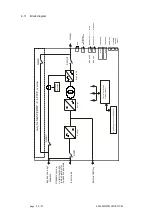
Block diagram
In
p
u
t
m
a
in
s
B
y
p
a
s
s
l
in
e
i
n
p
u
t
s
e
p
a
ra
te
E
x
te
rn
a
l
B
a
tt
e
ry
O
u
tp
u
t
S
ta
n
d
a
rd
J
u
m
p
e
r
o
n
t
e
rm
in
a
l
b
o
a
rd
S
W
B
Y
S
W
IN
S
W
M
B
S
W
O
U
T
In
v
e
rt
e
r
S
ta
ti
c
s
w
it
c
h
R
e
c
ti
fi
e
r
S
ig
n
a
lli
n
g
s
a
n
d
c
o
m
m
a
n
d
p
a
n
e
l
B
a
c
k
fe
e
d
p
ro
te
c
ti
o
n
C
o
n
tr
o
l
c
ir
c
u
it
w
it
h
m
ic
ro
p
ro
c
e
ss
o
r
E
P
O
S
ig
n
a
lli
n
g
a
n
d
a
la
rm
r
e
m
o
te
R
S
2
3
2
-1
l
in
e
-
--
--
--
--
--
fo
r
P
C
R
S
2
3
2
-2
l
in
e
-
--
--
--
--
--
fo
r
M
o
d
e
m
D
B
9
f
e
m
a
le
D
B
9
m
a
le
1
-9
1
-9
1
3
1
4
1
-1
2
S
L
O
T
1
S
L
O
T
2
a
u
x
S
W
O
U
T
a
u
x
S
W
M
B
b
a
tt
.t
e
m
p
.
s
e
n
s
o
r
o
p
ti
o
n
a
l
c
a
rd
o
p
ti
o
n
a
l
c
a
rd
re
m
o
v
e
j
u
m
p
e
r
fo
r
b
y
-p
a
s
s
l
in
e
s
e
p
a
ra
te
o
n
ly
f
o
r
MA
S
T
E
R
H
P
-
U
L
P
T
C
E
v
er
si
o
n