





























RX72M Group
Single-Chip Motor Control via EtherCAT Communications
R01AN5434EJ0110 Rev.1.10
Page 26 of 85
Aug.31.2020
The symbols used in the above formulae, other than standard ones and those with meanings stated in the
table, are explained in Table 4-2.
Table 4-2 Symbols in the Conversion Formulae
Symbol
Description
Value
CPR
Number counted per rotation [count]
4000
T
S
Control cycle [s]
0.0005
K
Q
16.16 fixed point conversion coefficient
2
16
= 65536
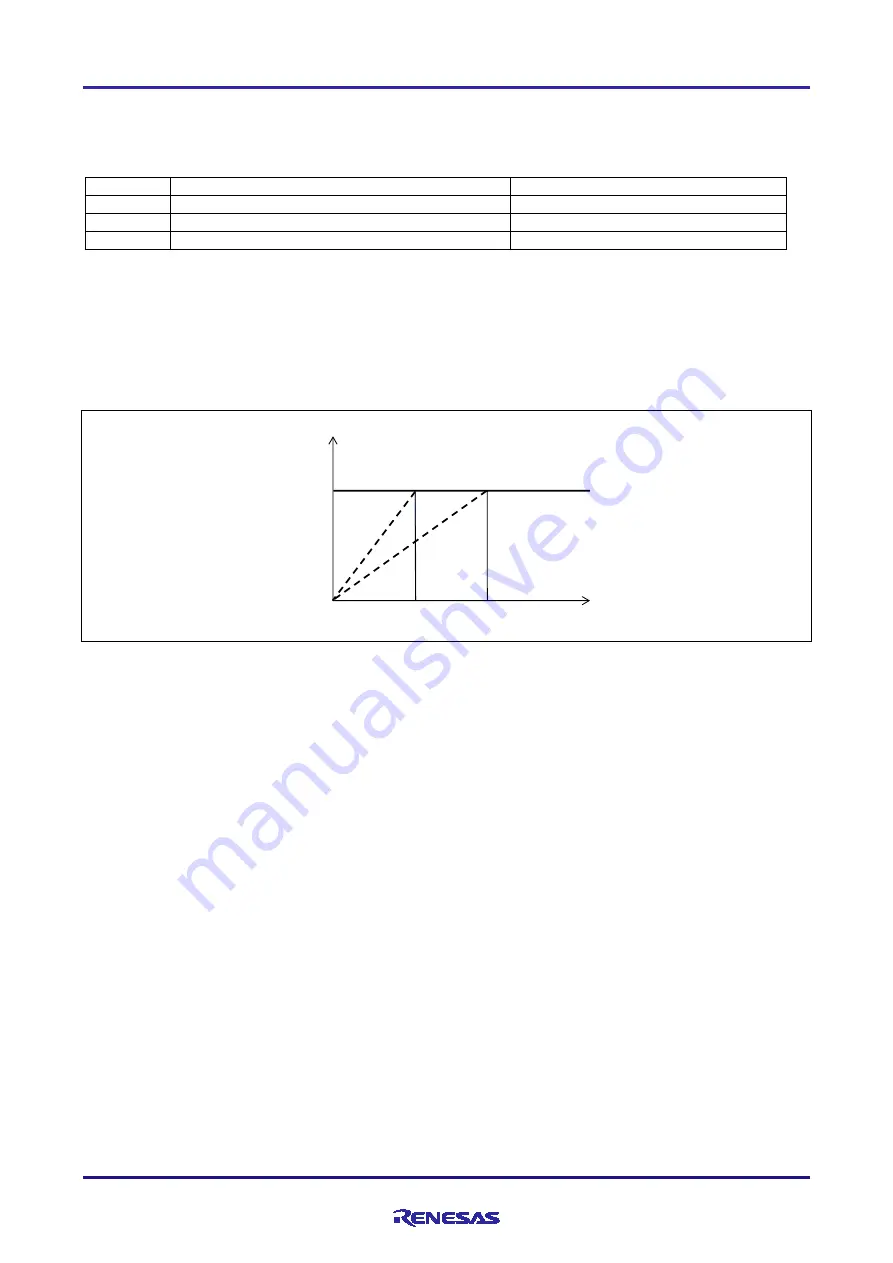
Note 1. Regarding acceleration in the RMW
RMW uses the time [s] to reach the target velocity as its definition of the acceleration.
Figure 4-1 shows how the acceleration changes from that for acc1 to that for acc2 by changing the
acceleration time to reach the target velocity from t1 to t2.
The acceleration at those times can be expressed by dividing the velocity by the acceleration times.
acc1 = speed ÷ t1
acc2 = speed ÷ t2
Figure 4-1 Acceleration Times and Acceleration
Examples of conversion:
・
Position command value
Convert
Θ
= 180[deg] to P
C
[count].
180 ÷ 360 × 4000 = 2000
・
Velocity command value
Convert R = 2000[rpm] to S
C
[count/s].
2000 ÷ 60 × 4000 × 0.0005 × 65536 = 4369066
・
Acceleration command value
When R = 2000[rpm], convert T
ACC
= 0.3[s] to A
C
[count/s
2
].
2000 ÷ 0.3 ÷ 60 × 4000 × 0.0005 × 0.0005 × 65526 = 7281
speed
acc1
acc2
t1
t2
V
[rpm]
t[s]







































































