





























CAN Controllers and Acceptance Filter
164
Philips Semiconductors
Preliminary User Manual
LPC2119/2129/2292/2294
ARM-based Microcontroller
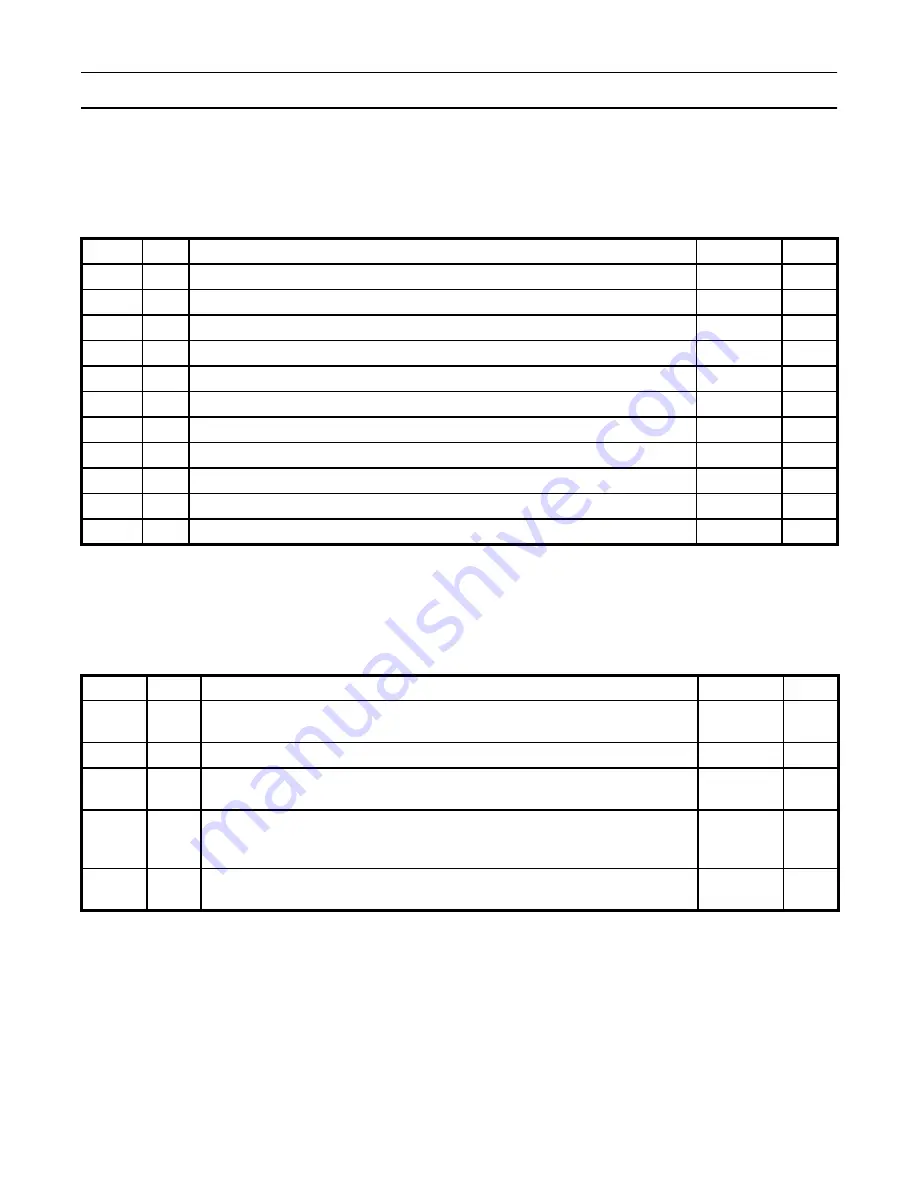
Interrupt Enable Register (CANIER - 0xE00x x010)
This read/write register controls whether various events on the CAN controller will result in an interrupt. Bits 7:0 in this register
correspond 1-to-1 with bits 7:0 in the CANICR register.
Bus Timing Register (CANBTR - 0xE00x x014)
This register controls how various CAN timings are derived from the VPB clock. It can be read at any time, but can only be written
if the RM bit in CANmod is 1.
Table 128: CAN Interrupt Enable Register (CANIER - 0xE00x x010)
CANIER Name Function
Reset Value RM Set
0
RIE
Receiver Interrupt Enable.
0
X
1
TIE1
Transmit Interrupt Enable (1)
0
X
2
EIE
Error Warning Interrupt Enable
0
X
3
DOIE Data Overrun Interrupt Enable
0
X
4
WUIE Wake-Up Interrupt Enable
0
X
5
EPIE Error Passive Interrupt Enable
0
X
6
ALIE
Arbitration Lost Interrupt Enable
0
X
7
BEIE Bus Error Interrupt Enable
0
X
8
IDIE
ID Ready Interrupt Enable
0
X
9
TIE2
Transmit Interrupt Enable (2)
0
X
10
TIE3
Transmit Interrupt Enable (3)
0
X
Table 129: CAN Bus Timing Register (CANBTR - 0xE00x x014)
CANBTR
Name
Function
Reset Value RM Set
0:9
BRP
Baud Rate Prescaler. The VPB clock is divided by (this value plus one) to produce
the CAN clock.
0
X
15:14
SJW
The Synchronization Jump Width is (this value plus one) CAN clocks.
0
X
19:16
TSEG1
The delay from the nominal Sync point to the sample point is (this value plus one)
CAN clocks.
1100
X
22:20
TSEG2
The delay from the sample point to the next nominal sync point is (this value plus
one) CAN clocks. The nominal CAN bit time is (this value plus the value in TSEG1
plus 3) CAN clocks.
001
X
23
SAM
1: the bus is sampled 3 times (recommended for low to medium speed buses)
0: the bus is sampled once (recommended for high speed buses)
0
X







































































