




















Technical Characteristics
High power devices
38
192-120149 N08 June 2014
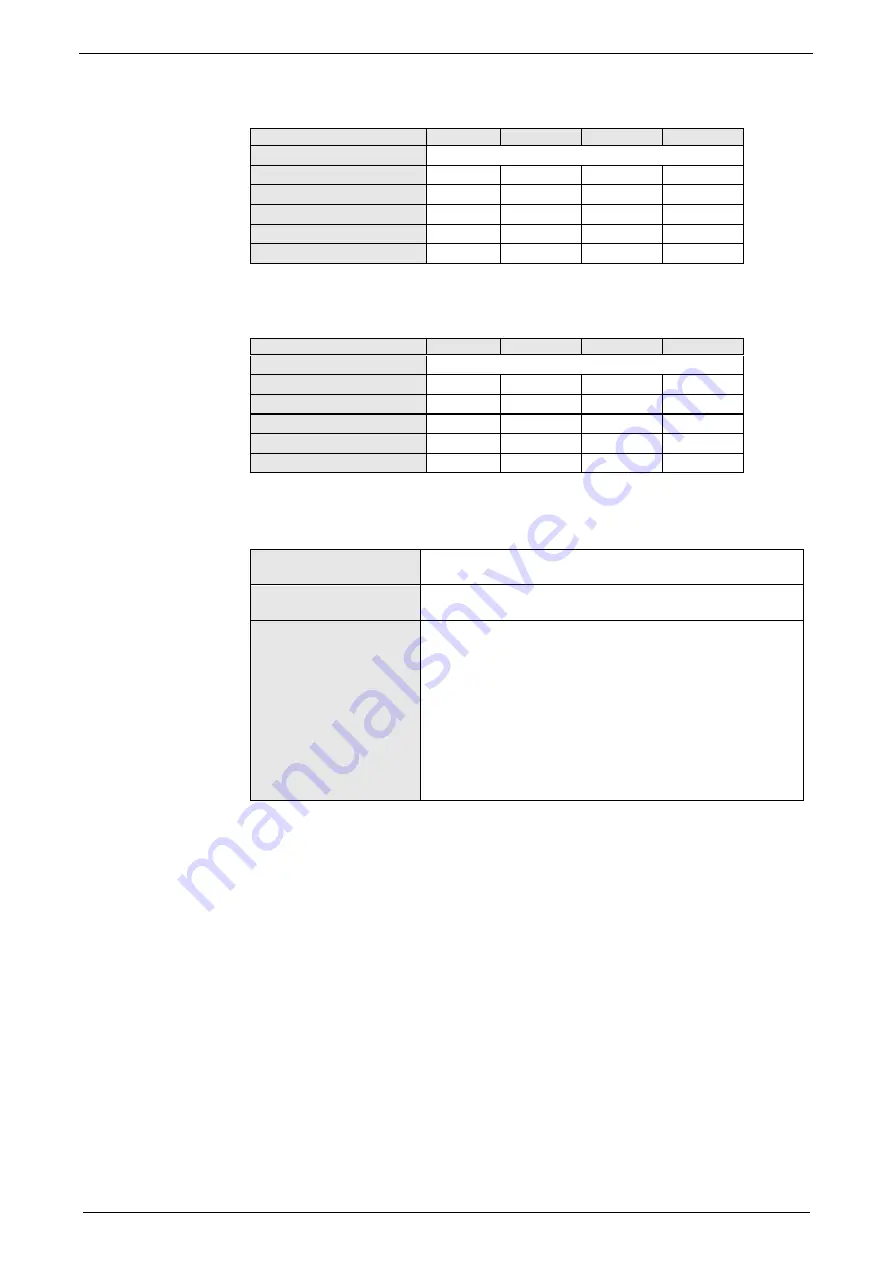
Output data Compax3Hxxx at 3*400VAC
Controller type
H050V4
H090V4
H125V4
H155V4
Output voltage
3x 0-400V
Nominal output current
50Arms
90Arms
125Arms
155Arms
Pulse current for 5s *
75Arms
135Arms
187.5Arms 232.5Arms
Power
35kVA
62kVA
86kVA
107kVA
Switching frequency
8kHz
8kHz
8kHz
8kHz
Power loss for In
880W
900W
1690W
1970W
* during low speeds, the overload time is reduced to 1s. Limit:
< 2.5 electric rev/s (= actual revolutions/s * number of pole pairs) resp. >2.5 pitch/s
Output data Compax3Hxxx at 3*480VAC
Controller type
H050V4
H090V4
H125V4
H155V4
Output voltage
3x 0-480V
Nominal output current
43Arms
85Arms
110Arms
132Arms
Pulse current for 5s*
64.5Arms
127.5Arms 165Arms
198Arms
Power
35kVA
70kVA
91kVA
109kVA
Switching frequency
8kHz
8kHz
8kHz
8kHz
Power loss for In
850W
1103W
1520W
1800W
* during low speeds, the overload time is reduced to 1s. Limit:
< 2.5 electric rev/s (= actual revolutions/s * number of pole pairs) resp. >2.5 pitch/s
Resolution of the motor position
For option F10: Resolver
Position resolution: 16 Bits (= 0.005°)
Absolute accuracy: ±0.167°
For option F11: SinCos
©
Position resolution: 13.5 Bits / Encoder sine period
=> 0.03107°/encoder resolution
For option F12:
Maximum position resolution
Linear: 24 Bits per motor magnet spacing
Rotary: 24 Bits per motor revolution
For 1Vss Sine-Cosine encoders (e.g. EnDat):
13.5 bits / graduation of the scale of the encoder
For RS 422 encoders: 4x encoder resolution
Accuracy of the feedback zero pulse acquisition =
accuracy of the feedback resolution.
Resolution for analog hall sensors with 1Vpp signal:
13.5 Bits / motor magnet spacing
Accuracy
The exactitude of the position signal is above all determined by the exactitude of the
feedback system used.
This manual was downloaded on www.sdsdrives.com
+44 (0)117 938 1800 - [email protected]







































































