



























➁
Getting Started
5
➁
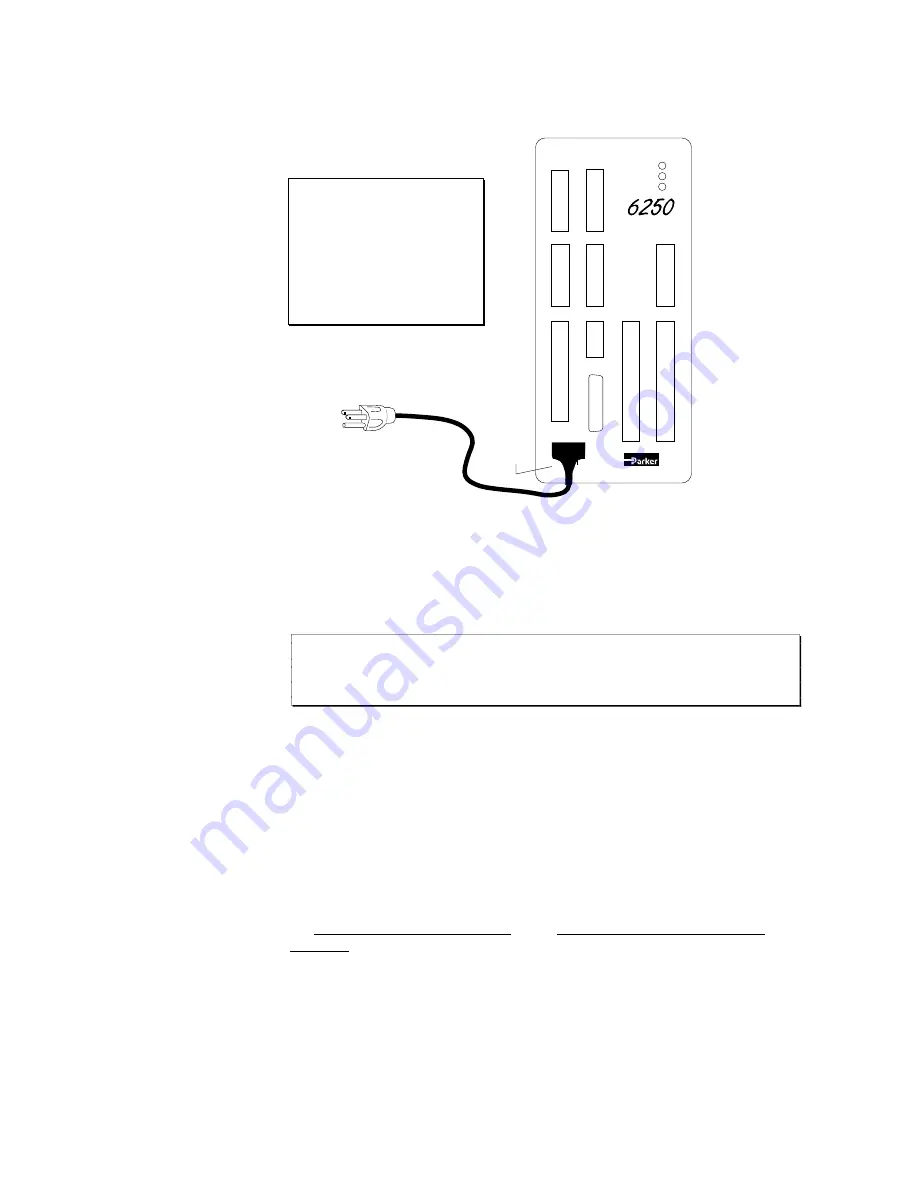
Connect Power Cable
The 6250 is shipped with an 8-foot power cable that is prewired and keyed. Attach the power
cable to the 6250's
POWER
connector as illustrated below.
WARNING
DO NOT APPLY POWER
TO THE 6250 UNTIL
INSTRUCTED TO DO SO
IN THE FOLLOWING
TEST PROCEDURE.
POWER
EARTH
N/A
NEUT
LINE
C o m p u m o t o r
2 - A X I S S E R V O
C O N T R O L L E R
85 - 240VAC
If you have a power source other than
85-240VAC, refer to Chapter 8 for
specifications on alternative input power.
Protective
Rubber
Boot
➂
Test Procedure
Use the following procedure to test the 6250's power and RS-232C connections. In Chapter 3,
Installation, you will test the analog output, end-of-travel and home limits, encoders, RP240,
joystick, and programmable I/O.
➀
Apply power to the 6250 by plugging the power cable into a grounded power source.
CAUTION
The earth ground connection must be made by plugging into a grounded receptacle
or by physically connecting the green wire to earth ground.
➁
Watch the LEDs on the 6250. The STATUS LED should be green, indicating the 6250 is ready
for operation. The other two LEDs should be red because the drives are not yet enabled with the
DRIVE11
command.
If the STATUS LED is red, or if none of the LEDs illuminate, check your power source and cable
connections. If these connections seem correct, disconnect power and consult Chapter 9,
Troubleshooting.
➂
If you are using the 6000 DOS Support Disk, go to the
Set-up
menu and move the cursor down
to
CHECK OUT
and press
ENTER
to automatically verify the communication interface to the
6250.
If the interface is not successful (
Device not Ready
message will flash on the screen), refer
to the RS-232C troubleshooting procedures in Chapter 9, Troubleshooting.
➃
Initiate the terminal emulator in Motion Architect or in the 6000 DOS Support Disk (refer to
the Motion Architect User Guide or the 6000 DOS Support Disk Quick
Reference if necessary). You could also use your own terminal emulator package.
Press the RETURN key. The cursor should move down one or two lines each time you press the
RETURN key. If the cursor does not move as described, refer to the RS-232C troubleshooting
procedures in Chapter 9, Troubleshooting.