





























129
[Operation Setting]
Operation
Setting
Combined block operation procedure (example)
1. Set a 16-bit positioning parameter and step parameter. (Refer to “Parameters Used in this Operation
Example” below.)
2. Execute the homing. (Refer to “Homing Operation” on page 114.)
3. Specify the point 1 when the servo turns on and input the strobe signal input (STB: CN X5 Pin 24). Then,
an operation is performed without stopping, e.g., [01] –
> [02].
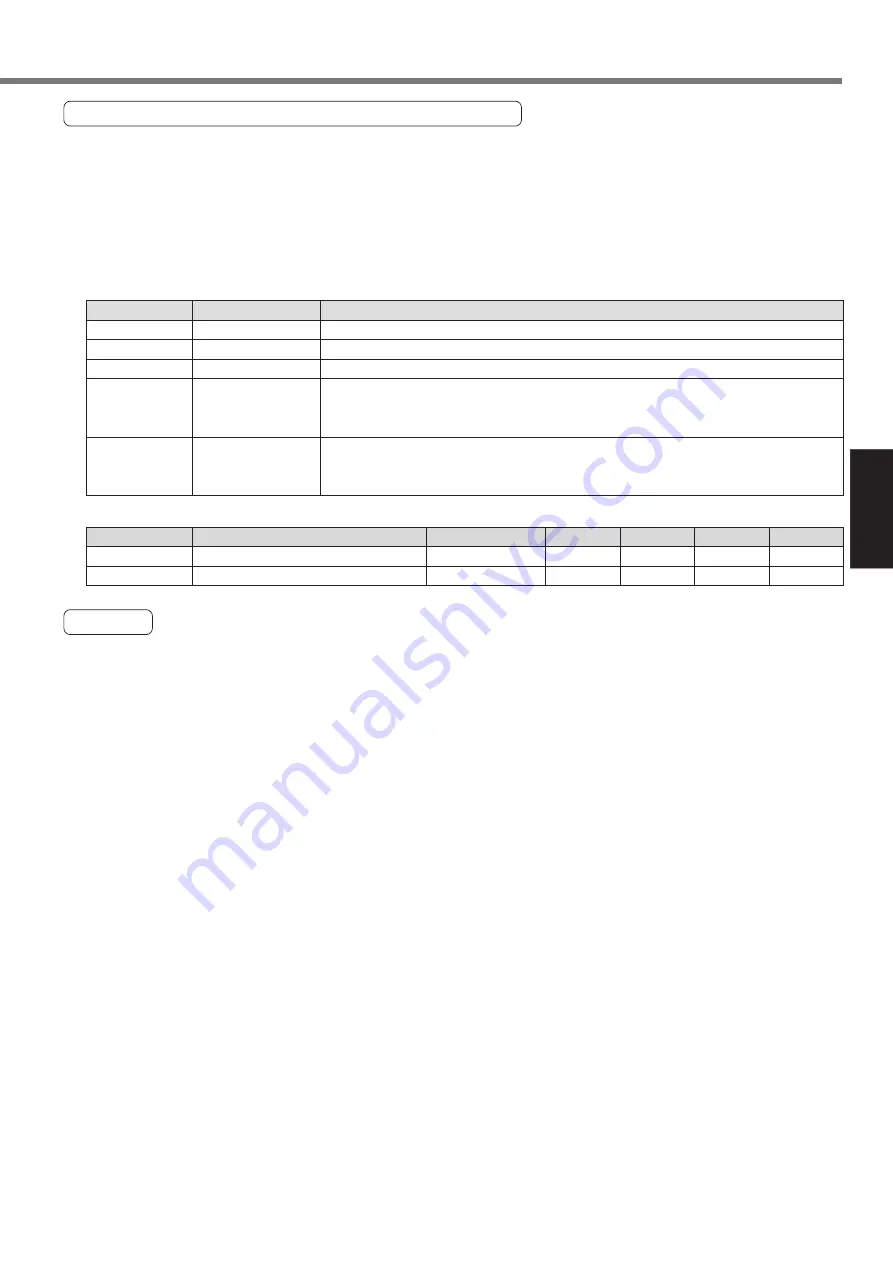
• Parameters Used in this Operation Example
Caution
1) A combined operation up to a maximum point number (specified by the settings of SV.Pr57 (selection of
number of input points)) available as a step operation can be performed. However, the maximum point
number is treated as the “Single” operation, regardless of the block setting.
2) If the block setting of the next point number is “Dwell time”, an operation works like the continuous block
operation (refer to page 127).
3) Do not specify “Rotary” as an operation mode. The combined block operation is unavailable in the rotary
axis operation.
4) During the combined block operation, the linear acceleration/deceleration only is enabled and the S-
shaped acceleration/deceleration is ignored. The deceleration speed at the combined points must be all
the same.
5) If a step operation in a reverse traveling direction is defined as a combined block operation by the “Block”
designation, the motor moves to the first point by step, stops once, moves back and then starts an opera-
tion to the next point.
6) The change into the last point number (point “10” in this example) of the in-operation signal output (BUSY:
CN X5 Pin 28) and the current position output (P1OUT to P32OUT: CN X5 Pin 29, 30, 31, 32, 33 and 34)
is made only when the last step operation of the combined block operation has completed and the strobe
signal input (STB: CN X5 Pin 24) is in the OPEN state. Be sure to make the strobe signal input (STB) open
after the in-operation signal output (BUSY) turns OFF.
Incremental operation (Incremental)
Incremental operation (Incremental)
10000
5000
VEL1
VEL2
ACC1
ACC1
DEC1
DEC1
Block
Single
01
02
Step parameter
16-bit positioning parameter
16.Pr**
54
01
02
10
12
Symbol in diagram
–
VEL1
VEL2
ACC1
DEC1
Description
Specify a type of block operation. ([1] for the combined block operation)
Specify the first speed. (0 to 6000 r/min)
Specify the second speed. (0 to 6000 r/min)
Specify the acceleration speed. (0 to 10000 ms)
Specify in the acceleration speed in a range between 0 and 3000 r/min.
The acceleration speed at the combined points must be all the same.
Specify the deceleration speed. (0 to 10000 ms)
Specify in the deceleration speed in a range between 3000 and 0 r/min.
The deceleration speed at the combined points must be all the same.
Operation mode
Position/Waiting time
Speed
Acceleration Deceleration
Block
ST.Pr**





















































