















1.5 System Cable Connections
NOTE:
Check the tightness of the mounting bolts one week after initial installation,
and then recheck every 6 months. For periodic maintenance, refer to the Quattro
User’s Guide.
1.5 System Cable Connections
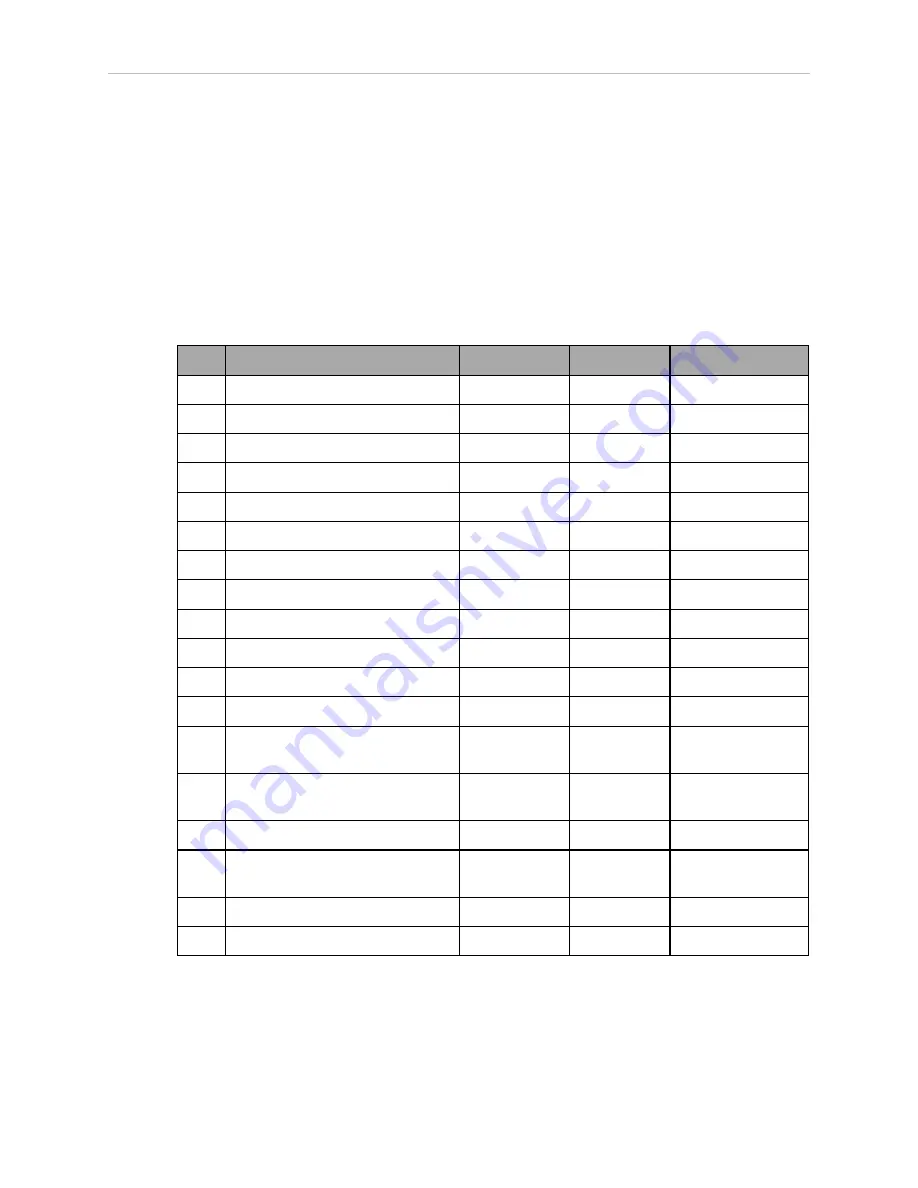
Open the Accessory box and locate the eAIB XSYSTEM cable. Connect the cables and peri-
pherals as shown in the following figure. Parts and steps are covered in the following two
tables. Refer to the System Installation chapter in your
Quattro User's Guide
for power spe-
cifications and wiring instructions.
Part
Cable and Parts List
Part #
Part of:
Notes
A
eAIB XSYSTEM Cable Assembly
13323-000
standard, eAIB
B
User E-Stop, Safety Gate
n/a
n/a
user-supplied
C
XUSR Jumper Plug
04736-000
13323-000
standard, eAIB
D
Front Panel
90356-10358
standard
E
Front Panel Cable
10356-10500
90356-10358
standard
F
Front Panel Jumper Plug
10053-000
13323-000
standard, eAIB
G
XMCP Jumper Plug
04737-000
13323-000
standard, eAIB
H
T20 Bypass Plug
10048-000
10055-000
standard, T20
J
T20 Adapter Cable
10051-003
10055-000
standard, T20
K
T20 Pendant (option)
10055-000
option
L
AC Power Cable (option)
04118-000
90565-010
user-supplied
M
24 VDC Power Cable (option)
04120-000
90565-010
user-supplied
N
24 VDC, 6 A Power Supply
(option)
04536-000
90565-010
user-supplied
P
Ethernet Cable - PC -> PLC
(Only while programming PLC)
n/a
n/a
user-supplied
Q
Ethernet Cable - PLC -> switch
n/a
n/a
user-supplied
R
Ethernet Cable - switch ->
SmartVision MX
n/a
n/a
user-supplied
S
Ethernet switch, cable
n/a
n/a
user-supplied
T
Camera and cable
n/a
n/a
option
Power Requirements
The power requirements for the SmartVision EX and the Quattro robots are covered in their
respective user guides. For 24 VDC, both can be powered by the same power supply.
Quattro ePLC650/800 Quick Setup Guide, 13588-000 Rev D
Page 8 of 16
Summary of Contents for Quattro 650H
Page 1: ...I598 E 01 Quick Setup Guide Quattro 650H 650HS 800H 800HS ePLC...
Page 14: ......
Page 15: ......







































































