















1.4 Installing the Robot
Using Eye Bolts:
1. Remove all lag bolts from the robot base mounting pads.
2. Screw the M16 eyebolts into opposing robot mounting pads, so that the robot will be bal-
anced when lifted.
3. Lock each eyebolt with a jam nut.
4. Connect slings to the M16 eyebolts and take up any slack in the slings.
CAUTION
: Do not to lift the robot from any points other
than the eyebolts. Failure to comply could result in the robot
falling and causing either personnel injury or equipment
damage.
5. Lift the robot and position it directly over the mounting frame pads.
If lifting from inside the frame, you will have to twist the robot so that its mounting
pads clear the frame mounting pads, and you can raise it above the frame.
6. Slowly lower the robot while aligning the M16 holes in the robot mounting pads with
the holes in the frame mounting pads.
7. When the mounting pad surfaces are touching, start a bolt in each of the two unused
mounting holes.
8. Remove the slings and M16 eyebolts.
9. Refer to the table in Install Mounting Hardware on page 7 for mounting bolt torques.
Using Slings:
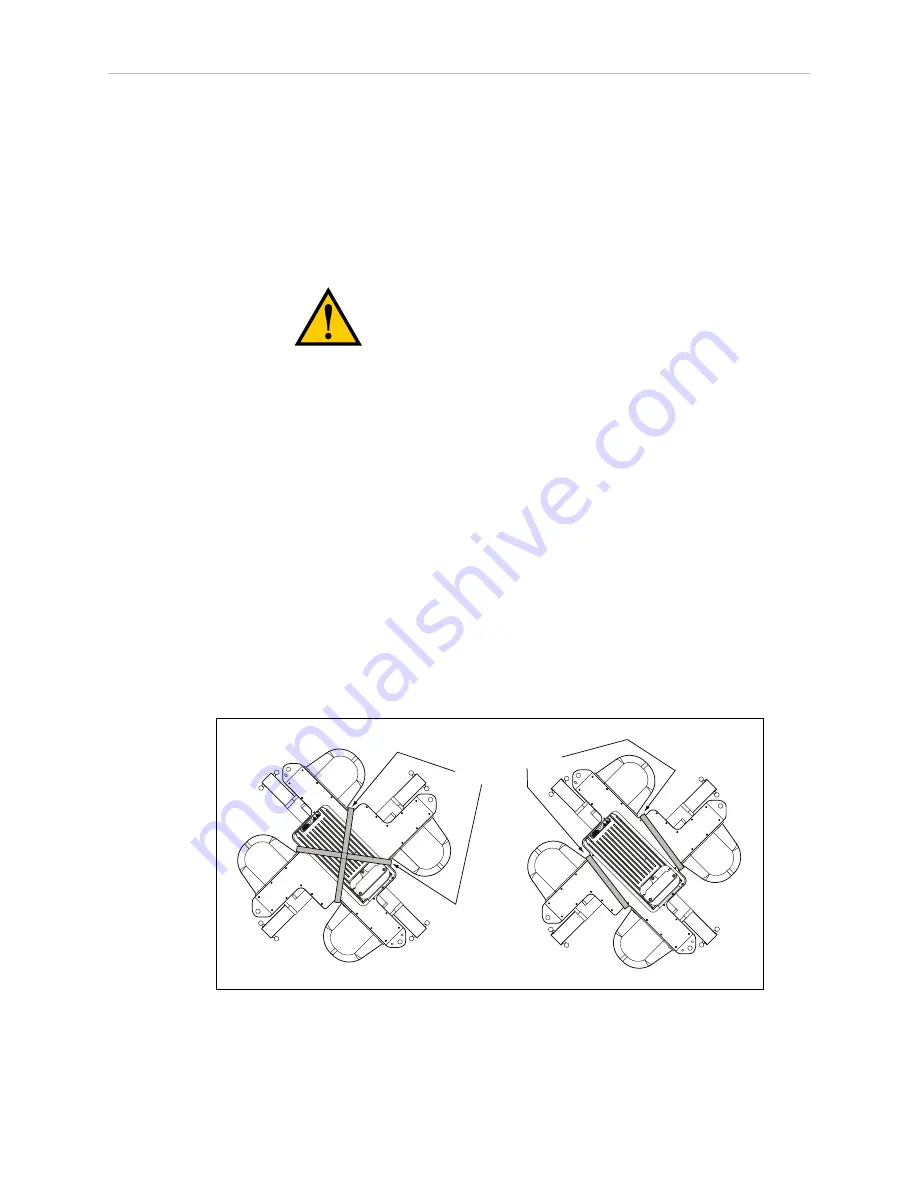
NOTE
: Nylon slings can be wrapped across the center of the robot base, away from
the inner arms and status display. See the following figure.
Slings
Slings
Figure 1-3. Safe Locations for Lifting a Quattro with Nylon Slings
Quattro ePLC650/800 Quick Setup Guide, 13588-000 Rev D
Page 6 of 16
Summary of Contents for Quattro 650H
Page 1: ...I598 E 01 Quick Setup Guide Quattro 650H 650HS 800H 800HS ePLC...
Page 14: ......
Page 15: ......







































































