























FND-X
j
-SRT
FND-X
j
-SRT
82
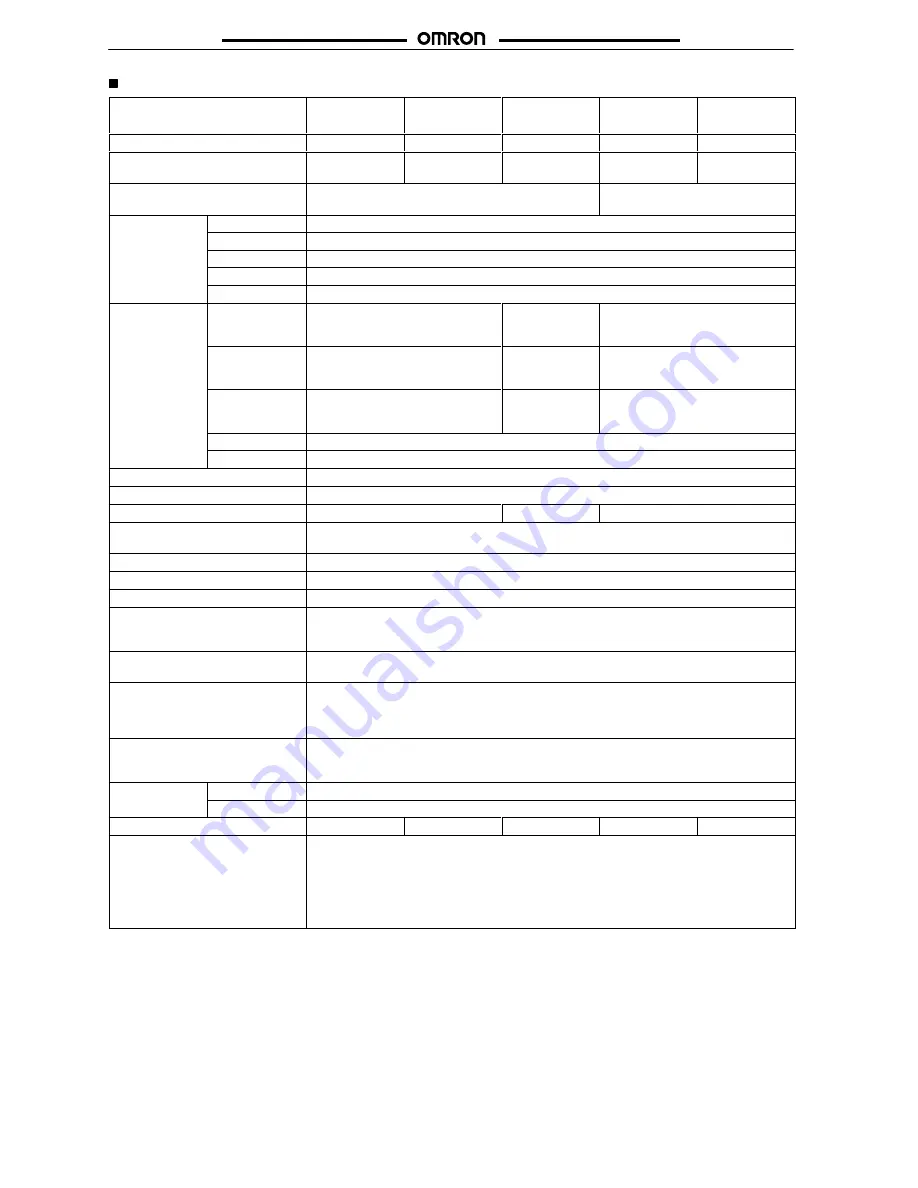
Performance Specifications
Model (see note 1)
Item
FND-X06H-SRT
FND-X12H-SRT
FND-X25H-SRT
FND-X06L-SRT
FND-X12L-SRT
Continuous output current (0-P)
2.0 A
4.8 A
8.0 A
2.0 A
3.0 A
Momentary maximum output
current (0-P)
6.0 A
12 A
25 A
6.0 A
12 A
Input power supply
Single-phase 200/240 VAC (170 to 264 V) 50/60 Hz
Single-phase 100/115 VAC (85 to
127 V) 50/60 Hz
Position/speed
f
db
k
U Series (INC)
Optical Incremental encoder, 2,048 pulses/revolution
os o /speed
feedback
U Series (ABS)
Optical Absolute encoder, 1,024 pulses/revolution
U-UE Series
Optical Incremental encoder, 1,024 pulses/revolution
H Series
Magnetic Incremental encoder, 2,000 pulses/revolution
M Series
Resolver, absolute accuracy 0.18
°
max.; ambient temperature 25
°
Applicable load
inertia
U Series (INC)
Maximum of 30 times motor’s rotor
inertia
Maximum of 20
times motor’s
rotor inertia
Maximum of 30 times motor’s rotor
inertia
U Series (ABS)
Maximum of 20 times motor’s rotor
inertia
Maximum of 18
times motor’s
rotor inertia
Maximum of 20 times motor’s rotor
inertia
U-UE Series
Maximum of 30 times motor’s rotor
inertia
Maximum of 20
times motor’s
rotor inertia
Maximum of 30 times motor’s rotor
inertia
H Series
Maximum of 10 times motor’s rotor inertia
M Series
Maximum of 10 times motor’s rotor inertia
Inverter method
PWM method based on IGBT
PWM frequency
10 kHz
Weight
Approx. 1.5 kg
Approx. 2.5 kg
Approx. 1.5 kg
Frequency response (speed
control)
100 Hz (at a load inertia equivalent to motor’s rotor inertia)
Position loop gain
1 to 200 (rad/s)
Feed forward
0% to 200% of speed reference
Pulse rate
1/32,767
v
(pulse rate 1 / pulse rate 2)
v
32,767/1
Positioning completion width
1 to 32,767 (pulses)
U Series (INC): 8,192 pulses/revolution; U Series (ABS): 4,096 pulses/revolution;
M Series 24,000 pulses/revolution
Acceleration/Deceleration time
0 to 9,999 (ms); acceleration and deceleration times set separately. Two types can be set for
each. S-curve acceleration/deceleration function available (filter time constant: 0.00 to 32.76 s).
Sequence input
19 pts. (limit inputs, origin proximity, RUN command, START, alarm reset, origin search, JOG
operation, teaching, point selection, position data, deceleration stop)
Photocoupler input: 24 VDC, 8 mA
External power supply: 24 VDC
±
1 V, 150 mA min.
Sequence output
15 pts. (brake output, READY, origin search completion, origin, teaching, motor running,
positioning completion, alarm, point output, position selection, speed selection)
Open collector output: 24 VDC, 40 mA
Monitor output
(S
t 2 )
Speed monitor
3 V/motor’s rated speed (output accuracy: approx.
±
10%)
o
o ou pu
(See note 2.)
Current monitor
3 V/motor’s maximum current (output accuracy: approx.
±
10%)
Regenerative absorption capacity
13 W + 17 J
24 W + 17 J
37 W + 22 J
13 W + 17 J
17 W + 17 J
Protective functions
Overcurrent, overvoltage, voltage drop, resolver disconnection, power status error, clock
stopped, overcurrent (soft), speed amp saturation, motor overload, temporary overload,
resolver error, speed over, error counter over, parameter setting error, software limit over,
coordinate counter over, overrun, encoder disconnection, encoder communications error,
absolute encoder backup error, absolute encoder checksum error, absolute encoder absolute
error, absolute encoder over speed, encoder data not transmitted, BCD data error, present
value undetermined, PTP data not set
Note:
1. When using the 100-VAC-input Position Drivers in combination with the U-series or U-series UE type models, use 200-VAC Servo-
motors (-HA, -TA , or -H models).
2. For the monitor output, the monitor items and voltage polarity can be set by parameter UP-25 (monitor output selection).







































































