










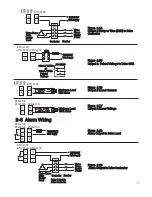
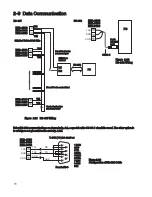











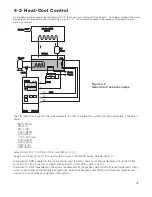





3-3 Control Outputs
There are 4 kinds of control modes that can be configured, as shown in
Table 3.1
Table 3.1 Heat-Cool Control Setup Value
: Don't care
:Adjust to met process requirements
:Required if ON-OFF control is configured
Control
Modes
Heat only
Cool only
Heat: PID
Cool: ON-OFF
Heat: PID
Cool: PID
OUT1
REVR
DIRT
REVR
REVR
OUT2
DE.HI
COOL
O1HY
O2HY
CPB
DB
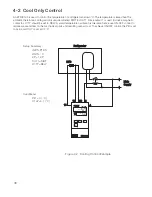
Heat Only ON-OFF Control : Select REVR for OUT1, Set PB to 0, O1HY is used to adjust dead band for ON-OFF
control, The output 1 hysteresis (O1HY) is enabled in case of PB = 0 . The heat only on-off control function is
shown in the following diagram :
Heat Only ON-OFF Control :
SP1
SP1 O1HY
ON
OFF
OUT1 Action
PV
Dead band = O1HY
Time
Time
Figure 3.2
Heat Only ON-OFF Control
Figure 3.2
Heat Only ON-OFF Control
20
The ON-OFF control may introduce excessive process oscillation even if hysteresis is minimized. If ON-OFF
control is set (ie. PB = 0), TI, TD, CYC1, OFST, CYC2, CPB, DB will be hidden and have no function to the
system. The auto-tuning mode and bumpless transfer will be disabled too.
Select REVR for OUT1, set TI to 0, OFST is used to adjust the control offset (manual
reset).
if PB is not equal to 0.
OFST is measured by % with range 0 - 100.0%. In
the steady state (ie. process has been stabilized) if the process value is lower than the set point by a definite value,
for example 5°C, while 20°C is used for PB, that is
lower, then increase OFST 25%, and vice versa. After
adjusting the OFST value, the process value will be varied and eventually, coincide with the set point. Using the
P control (TI set to 0), the auto-tuning is disabled. Refer to section 3-12 " manual tuning " for the adjustment of
PB and TD. Manual reset (adjust OFST)is not practical because the load may change from time to time and often
need to adjust OFST repeatedly. PID control setup can avoid this situation.
Heat only, P (or PD) control:
O1HY is hidden
OFST Function:
25%
Heat only, P (or PD) control:
O1HY is hidden
OFST Function:
Heat only PID control :
PID and Fuzzy
overshoot and a fast
Selecting REVR for OUT1, PB and TI should not be zero. Operate auto-tuning for the new
process, or set PB, TI and TD with historical values. See section 3-11 for auto-tuning operation. If the control result is
still unsatisfactory, then use manual tuning to improve the control . See section 3-12 for manual tuning. The unit
contains a
to achieve
to the
process if it is properly tuned.
sophisticated
algorithm
minimal
response
Heat only PID control :
PID and Fuzzy
overshoot and a fast
sophisticated
algorithm
minimal
response







































































