





















©
National Instruments Corporation
45
NI 9930 Motion Control Accessories User Guide
Note
The
Axis Configuration
dialog box user interface may not match this image exactly
depending on which version of the LabVIEW NI SoftMotion Module you are using.
2.
On the General Settings page set the
Loop Mode
to
Closed-Loop
.
3.
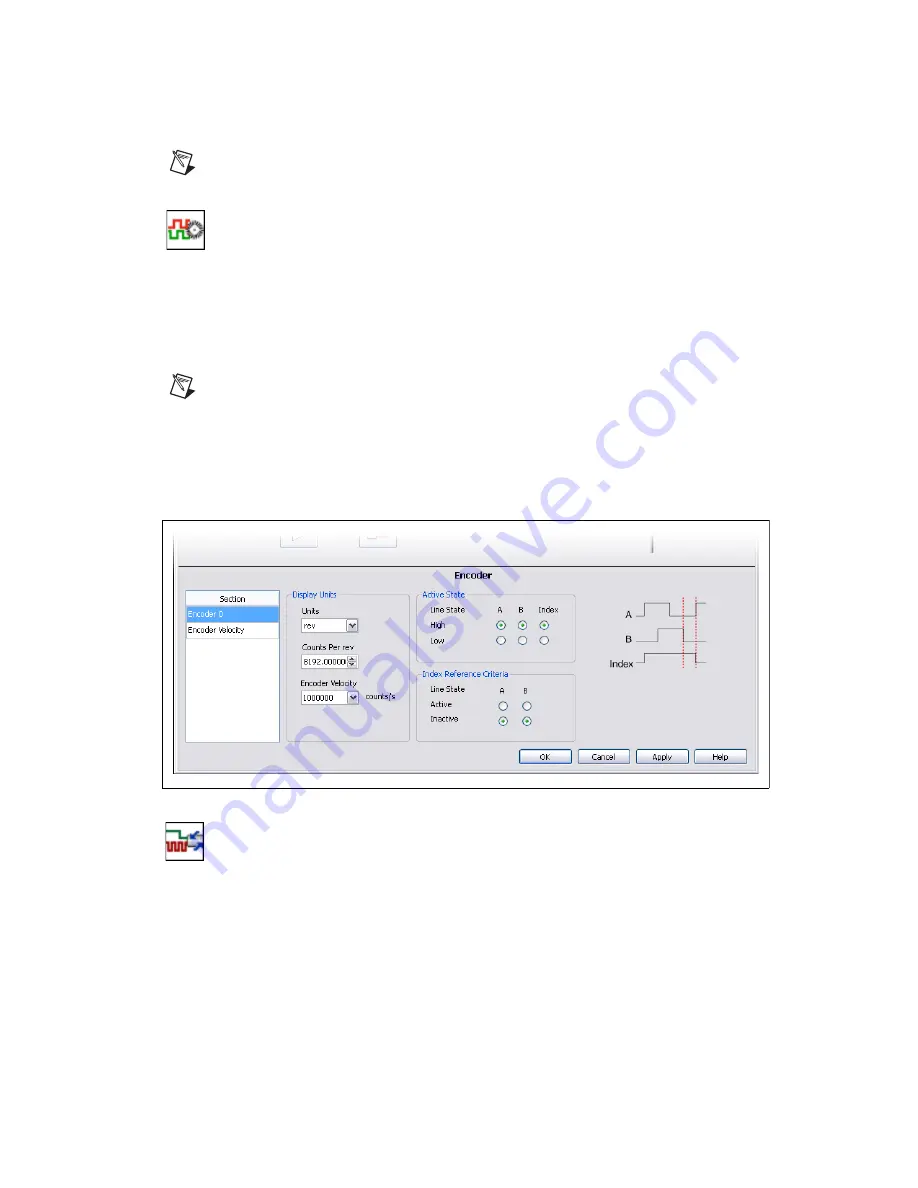
Click the Encoder button and configure the Units and Counts Per Unit.
a.
Make the following changes in the
Active State
section:
•
Set the
Line State
for
A
to
High
.
•
Set the
Line State
for
B
to
High
.
•
Set the
Line State
for
Index
to
High
.
b.
In the
Index Reference Criteria
section set the
Line State
for
A
and
B
to
Inactive
.
c.
Type
rev
in the
Units
text box.
d.
Set the
Counts per rev
to the correct value based on your encoder resolution.
Note
NI SoftMotion uses x4 encoding, so the encoder resolution needs to be converted to
quadrature counts per revolution before entering the information into the
Axis Configuration
dialog
box. If your encoder does not supply resolution in quadrature counts per revolution, determine
quadrature counts per revolution by multiplying the encoder resolution in encoder lines or periods by
four. Encoder counts per revolution is also referred to as counts per index. For example, a 500 line
encoder has 2,000 quadrature counts per revolution.
When you are finished the Encoder Settings page will look similar to Figure 33.
Figure 33.
Axis Configuration Encoder Page
4.
Click the
Stepper
button to open the
Stepper
page. Configure the stepper output and steps per rev
settings:
a.
Set
Output Mode
to
Step and Direction
.
b.
Set
Output Type
to
Differential
.
c.
Set
Active State
to
Low
.
d.
Set
Steps Per rev
depending on the encoder resolution. For example, if you are using an
encoder with 2048 pulses per revolution, set
Steps Per rev
to 2048.
Summary of Contents for NI 9930
Page 1: ...cRIO 9014...