




























12
2 CONTROL MODE
2.1 Control mode
Controlword/Statusword
By changing [Controlword (Obj. 6040h)], control commands can be given to the servo amplifier. The control status can also be
checked with [Statusword (Obj. 6041h)].
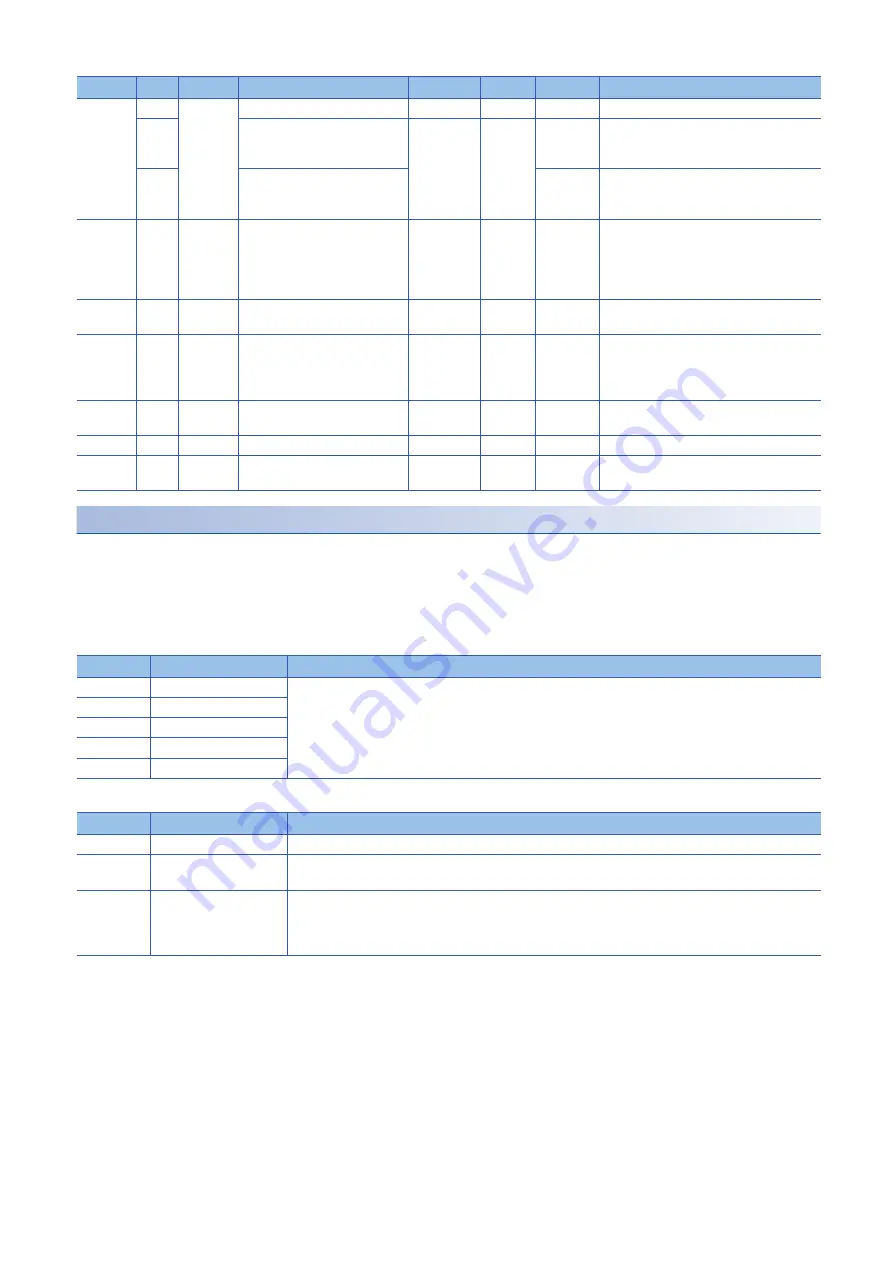
Some bits of [Controlword (Obj. 6040h)] and [Statusword (Obj. 6041h)] vary depending on the control mode. The bits that vary
depending on the control mode are listed in the following tables.
■
Controlword OMS Bit (csp)
■
Statusword OMS Bit (csp)
6091h
0
ARRAY
Gear ratio
U8
ro
2
Gear ratio
1
Motor revolutions
U32
rw
1
Number of revolutions of the servo motor
shaft (numerator)
Page 54 Electronic gear function
2
Shaft revolutions
1
Number of revolutions of the drive shaft
(denominator)
Page 54 Electronic gear function
607Eh
VAR
Polarity
U8
rw
0
Polarity selection
Bit 7: Position POL
Bit 6: Velocity POL
Bit 5: Torque POL
Page 44 Rotation direction selection
60A8h
VAR
SI unit position
U32
rw
SI unit position
00000000h (1 pulse)
60A9h
VAR
SI unit velocity
U32
rw
SI unit velocity
The SI unit velocity is returned.
FEB44700h (0.01 r/min)
00000300h (pulse/s)
60B0h
VAR
Position offset
I32
rw
0
Position offset
(pos units)
60B1h
VAR
Velocity offset
I32
rw
0
Velocity offset (vel units)
60B2h
VAR
Torque offset
I16
rw
0
Torque offset
Unit: 0.1 % (with rated torque being 100 %)
Bit
Symbol
Description
4
(reserved)
The value at reading is undefined. Set "0" when writing.
5
(reserved)
6
(reserved)
8
(reserved)
9
(reserved)
Bit
Symbol
Description
10
(reserved)
The value at reading is undefined.
12
Target position ignored
0: [Target position (Obj. 607Ah)] is being discarded.
1: [Target position (Obj. 607Ah)] is being used as a position control loop input.
13
Following error
0: No following error
1: Following error
Change this bit to "1" when a state exceeding [Following error window (Obj. 6065h)] elapses the period of time
set in [Following error time out (Obj. 6066H)].
Index
Sub
Object
Name
Data Type
Access Default
Description





















































