





























10
-2
M-Force GP1000
Control Modes
Details of the
M-Force GP1000
-Series Drive control modes and their features are provided in this section.
Control Modes and Features
M-Force GP1000
-Series Drives support the following five control modes, allowing the selection of a control
mode
to suit the required purpose.
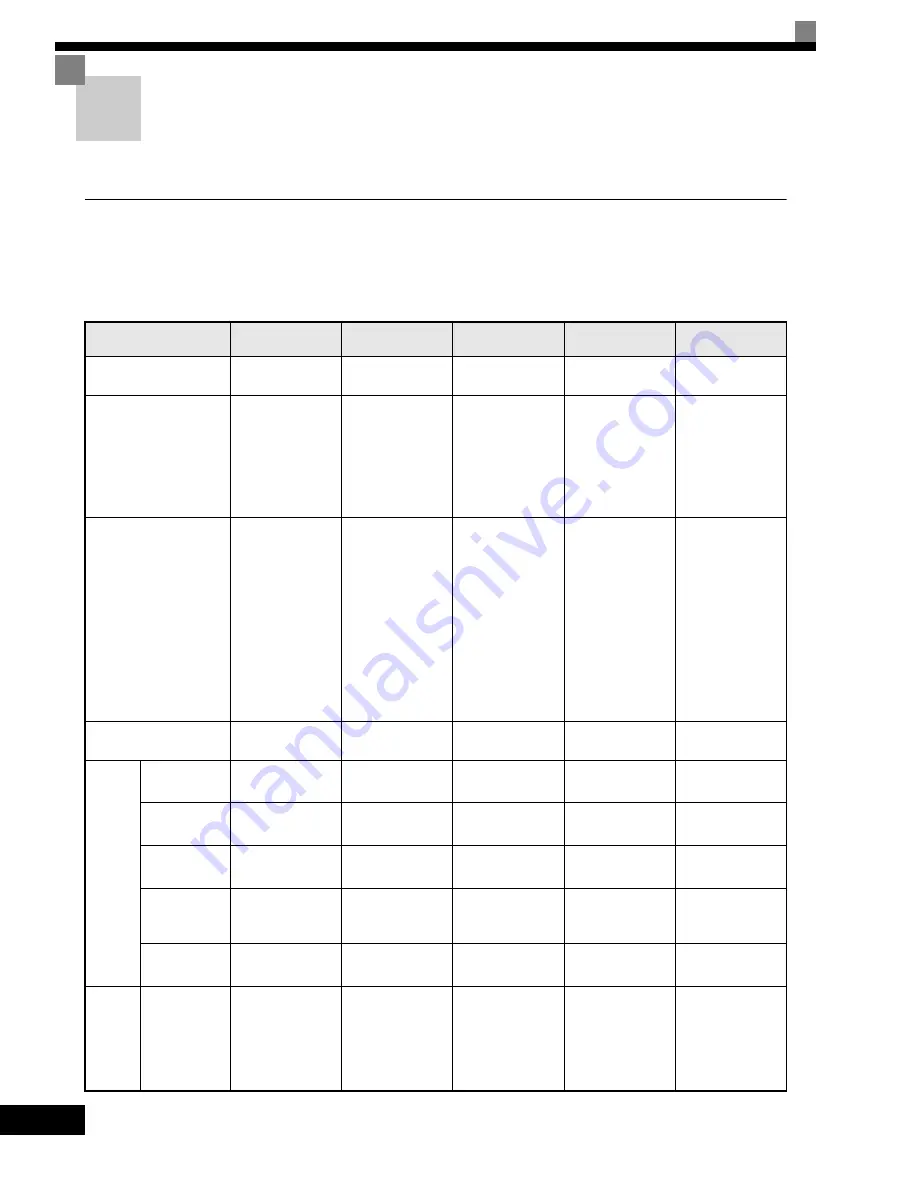
provides an overview of the control modes and their features.
Table 10.1 Overview and Features of Control Modes
Control Mode
V/f Control
without PG
V/f Control
with PG
Open-loop Vec-
tor Control 1
Flux Vector
Control
Open-loop Vec-
tor Control 2
Parameter Setting
A1-02 = 0
A1-02 = 1
A1-02 = 2
(factory setting)
A1-02 = 3
A1-02 = 4
Basic Control
Voltage/frequency
fixed ratio control
Voltage/frequency
fixed ratio control
with speed com-
pensation using a
PG
Current vector con-
trol without a PG
Current vector con-
trol with a PG
Current vector con-
trol without a PG
using a high-per-
formance mag-
netic flux and
speed estimator
(software)
Main Applications
Variable speed
control, particu-
larly for control of
multiple motors
with a single Drive
and for replacing
existing Drives
Applications
requiring high-pre-
cision speed con-
trol using a PG on
the machine side
Variable speed
control, applica-
tions requiring
high performance
without a PG on
the motor side, and
for replacing open-
loop vector control
of the previous VS-
616G5.
Very high-perfor-
mance control with
a PG on the motor
side (simple servo-
drives, high-preci-
sion speed control,
torque control, and
torque limiting)
Very high-perfor-
mance control
without a PG on
the motor side
(such as simple
servodrives, torque
control, and torque
limiting), and func-
tion applications
between flux vec-
tor and open-loop
vector 1 control.
PG Speed Control Card
(Option)
Not required.
Required (PG-A2
or PG-D2).
Not required.
Required (PG-B2
or PG-X2).
Not required.
Basic
Perfor-
mance
Speed Control
Range
*1
1:40
1:40
1:100
1:1000
1:200
*13
Speed Control
Accuracy
*2
2 to 3%
0.03%
0.2%
0.02%
0.2%
Speed
Response
*3
Approx. 1 Hz
Approx. 1 Hz
5 Hz
40 Hz
10 Hz
Maximum
Output Fre-
quency
400 Hz
400 Hz
400 Hz
400 Hz
60 Hz
*13
Starting
Torque
*4
150%/3 Hz
150%/3 Hz
150%/1 Hz
150%/0 min
1
150%/0.3 Hz
Applica-
tion
Func-
tions
Autotuning
Line-to-line resis-
tance (Normally
not required.)
Line-to-line resis-
tance (Normally
not required.)
Rotational autotun-
ing, stationary
autotuning, station-
ary autotuning for
line-to-line resis-
tance only
Rotational autotun-
ing, stationary
autotuning, sta5
ionary autotuning
for line-to-line
resistance only
Rotational autotun-
ing, stationary
autotuning, station-
ary autotuning for
line-to-line resis-
tance only







































































