




















I456
GB
CS
01
18
6
G
B
STARTUP METHODS
– ADXL supports two main start/stop methods:
•
Torque ramps (P05.01 = ON)
When ADXL is set to work in torque ramp mode, it controls the output voltage with a PID closed-loop control to ensure that the motor delivers a variable torque to the shaft which follows the programmed
acceleration and deceleration ramps. In this case, the resisting torque of the mechanical load defines the maximum torque demand during starting. If we set P01.04 Acceleration ramp to 10 sec, this means that
the system will take 10 seconds to ramp up from 0 to 100% of the motor's nominal torque. If the load is lower and requires only 50% of motor torque, the starting process, for the same ramp up slope, will
require proportionately less time to complete (in this case, 5 sec). If we start the motor without any load, the ramp will complete in a very short time and the starter will connect full voltage and the bypass in just
a few seconds. The same criteria apply to the deceleration ramp, which also has a constant slope and variable duration.
•
Voltage ramps (P05.01 = OFF)
If, on the other hand, the ADXL is set to work in voltage ramp mode, is delivers a ramp with an open loop criterion, and thus delivers from minimal to 100% voltage in the time set in P01.04, with gradual
growth, without varying the ramp duration in relation to the motor load. The same constant time criterion also applies to the deceleration ramp. In this case, even if the motor is running with no load, the bypass
will close after a fixed time. The voltage ramp thus behaves in a more repeatable manner than the torque ramp, but it has the disadvantage of delivering the mechanical force in a non-linear fashion, thus
providing a less gradual acceleration than the torque ramp.
– Together with these two starting methods, there is the maximum starting current limitation function:
•
Current limit (P01.02)
If the current delivered by the highest of the three phases reaches or exceeds the set limit, the ADXL reduces its voltage on the motor so as to remain below the maximum limit setting (P01.02). This behaviour
has priority over both torque and voltage ramps, and thus momentarily flattens them both. Obviously, reducing the current also reduces the motor's torque delivery: if the current limit is set too low, the torque
delivery may be insufficient to overcome the resistant load and start the machine. One must therefore find the right compromise when setting this parameter.
– There are minimum voltages and torques below which the motor will not turn at all, and which are therefore completely useless in practical terms (the motor makes noise and heats up without actually running).
There are thus two steps for regulating the initial voltage/torque (P01.03) and the final voltage/torque (P01.06). ADXL switches from zero to P01.03 immediately when starting up, and from P01.06 to zero during
deceleration .
– For further details on the starting parameter settings, refer to the description of the parameters in P01 GENERAL menu.
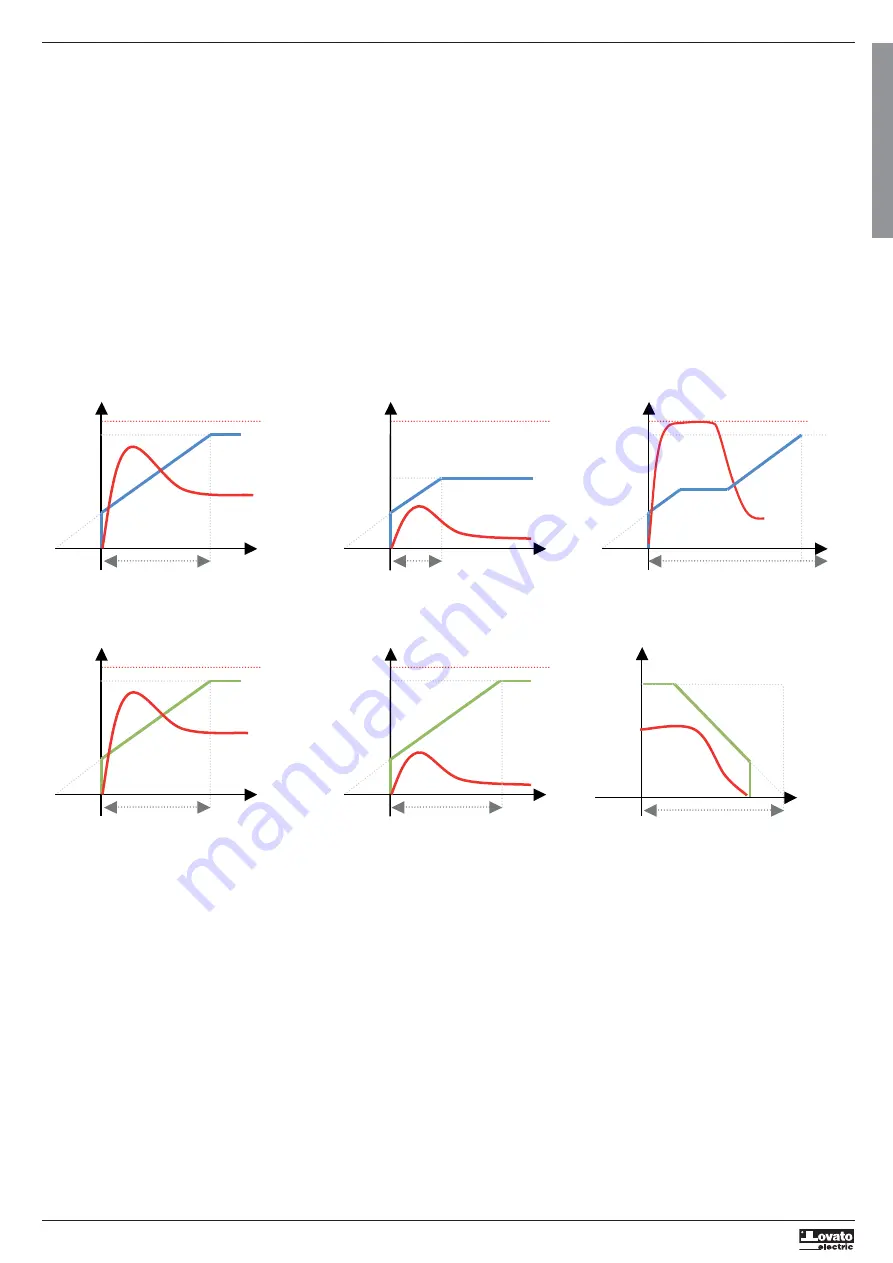
Torque ramp starting, without reaching the current limit.
t
%Tn
%In
Load = 100%
P01.03 =30%
P01.04 = 10s
P01.02 = 400%
300%
Current
Torque
Torque ramp starting, light load.
t
%Tn
%In
Load < 100%
P01.03 =30%
T < P01.04
P01.02 = 400%
200%
Current
Torque
Torque ramp starting, current limit tripped.
t
%Tn
%In
Load >= 100%
P01.03 =30%
> P01.04
P01.02 = 400%
Current
Torque
400%
Voltage ramp starting, without reaching the current limit.
%Vn
%In
t
Load = 100%
P01.03 =30%
P01.04 = 10s
P01.02 = 400%
300%
Current
Voltage
Voltage ramp starting, light load.
%Vn
%In
Current
Voltage
t
Load < 100%
P01.03 =30%
T = P01.04
P01.02 = 400%
200%
Voltage ramp stop.
t
%Vn
%In
P01.06 =30%
T = P01.05
Current
Voltage





















































