





















H2-506 Vector Easy Servo Drive User Manual Version 1.0
Leadshine Technology Co., Ltd
11/F, Block A3, iPark, No.1001 Xueyuan Blvd. Shenzhen, China
Tel: 1-949-608-7270 Fax: 1-949-608-7298
Web
:
www.leadshine.com
Email:
response, pulse width should be longer than 2.5uS(200K bandwidth) or 1uS(500K
bandwidth)
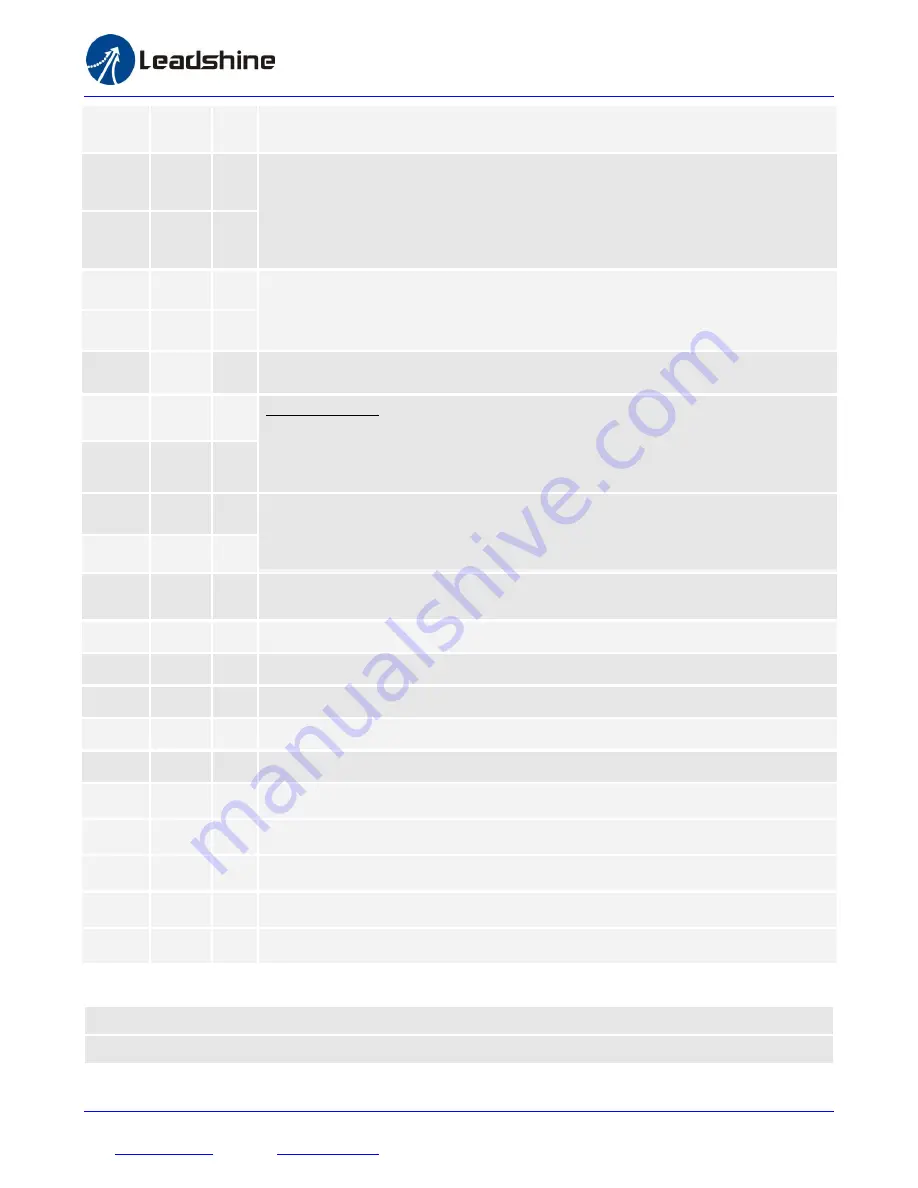
5
DIR+
I
Direction Signal: In single-pulse mode, this signal has low/high voltage levels,
representing two directions of motor rotation. In double-pulse mode (software
configurable), this signal is counter-clock (CCW) pulse, active both at high level and low
level. For reliable motion response, DIR signal should be ahead of PUL signal by 5μs at
least. 5-24V when DIR-HIGH, 0-0.5V when DIR-LOW. The direction signal’s polarity is
software configurable.
6
DIR-
I
7
NC
No connection.
8
NC
9
SGND
O
Signal GND
10
Pend+
O
In-position Signal: OC output signal, active when the difference between the actual
position and the command position is zero. This port can sink or source 20mA current at
24V. The resistance between Pend+ and Pend- is active at high impedance.
The signal also can be used for
brake output by setting parameter NO 30004 in
ProTuner.
11
Pend-
O
12
ALM+ O
Alarm Signal: OC (Open Collector) output signal, activated when one of the following
protection is activated: over-voltage, over current, braking error and position following
error. They can sink or source MAX 100mA current at 5V. The active impedance of
alarm signal is software configurable.
13
ALM-
O
14--16
NC
-
No connection.
17
FG
-
shield GND
18
SGND
Signal GND
19
+5V
I
5V+ input for encoder,50MA
20
AO+
O
Encoder A + output
21
AO-
O
Encoder A - output
22
BO+
O
Encoder B+ output
23
BO-
O
Encoder B- output
24
ZO+
O
Encoder Z+ output
25
ZO-
O
Encoder Z- output
26
SGND
Signal GND
3.2 Encoder Signal Input CN2
CN2 – Feedback Signal (Encoder) Connector
HDD15, 15Pin, Female







































































