





























Lake Shore Model 332 Temperature Controller User’s Manual
2.7 MANUAL
TUNING
There has been a lot written about tuning closed-loop control systems and specifically PID control
loops. This section does not attempt to compete with control theory experts. It describes a few basic
rules of thumb to help less experienced users get started. This technique will not solve every problem,
but it has worked for many others in the field. This section assumes the user has worked through the
operation sections of this manual, has a good temperature reading from the sensor chosen as a control
sensor, and is operating Loop 1. It is also a good idea to begin at the center of the temperature range of
the cooling system (not close to its highest or lowest temperature). AutoTune (Paragraph 2.8) is
another good place to begin, and do not forget the power of trial and error.
2.7.1 Setting
Heater
Range
Setting an appropriate heater output range is an important first part of the tuning process.
The heater
range should allow enough heater power to comfortably overcome the cooling power of the cooling
system
. If the heater range will not provide enough power, the load will not be able to reach the
setpoint temperature. If the range is set too high, the load may have very large temperature changes
that take a long time to settle out. Delicate loads can even be damaged by too much power.
Often there is little information on the cooling power of the cooling system at the desired setpoint. If
this is the case, try the following: Allow the load to cool completely with the heater off. Set manual
heater power output to 50% while in Open-loop control mode. Turn the heater to the lowest range and
write down the temperature rise (if any). Select the next highest heater range and continue the
process until the load warms up to room temperature. Do not leave the system unattended, the
heater may have to be turned off manually to prevent overheating. If the load never reaches room
temperature, some adjustment may be needed in heater resistance or load.
The list of heater range versus load temperature is a good reference for selection the proper heater
range. It is common for systems to require two or more heater ranges for good control over their full
temperature. Lower heater ranges are normally needed for lower temperature. The Model 332 is of
no use controlling at or below the temperature reached when the heater was off. Many systems can
be tuned to control within a degree or two above that temperature.
2.7.2 Tuning
Proportional
The proportional setting is so closely tied to heater range that they can be thought of as fine and
course adjustments of the same setting. An appropriate heater range must be known before moving
on to the proportional setting.
Begin this part of the tuning process by letting the cooling system cool and stabilize with the heater
off. Place the Model 332 in closed-loop control mode with manual PID tuning, then turn integral,
derivative and manual output settings off. Enter a setpoint several degrees above the cooling systems
lowest temperature. Enter a low proportional setting of approximately 5 or 10 and then enter the
appropriate heater range as described above. The heater display should show a value greater than
zero and less than 100%. The load temperature should stabilize at a temperature below the setpoint.
If the load temperature and heater meter swing rapidly, the heater range may be set too high and
should be reduced. Very slow changes in load temperature that could be described as drifting are an
indication of a proportional setting that is too low (which is addressed in the next step).
Gradually increase the proportional setting by doubling it each time. At each new setting, allow time
for the temperature of the load to stabilize. As the proportional setting is increased, there should be a
setting in which the load temperature begins a sustained and predictable oscillation rising and falling
in a consistent period of time. See Figure 2-3(a). The goal is to find the proportional value in which
the oscillation begins, do not turn the setting so high that temperature and heater output changes
become violent.
Record the proportional setting and the amount of time it takes for the load change from one
temperature peak to the next. The time is called the oscillation period of the load. It helps describe the
dominant time constant of the load which is used in setting integral. If all has gone well,
the
proportional setting is
one half
of the value required for sustained oscillation. See Figure 2-3(b).
2-12
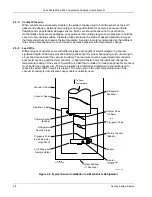
Cooling System Design







































































