



















1
General
5 of 26
Ro/Me/03/23 03.99.02 en
Valid for
KR 350/2
KR 350 L280/2
KR 350 L240/2
1
General
In the following description, only the KR 350 will be depicted in the illustrations. The
information in the description applies to all robot variants, however. Exceptions to this
will be clearly marked.
The Doc. Module “Safety, General” and the robot Doc. Module “Repair, General”
are to be observed!
With all work involving the connection of the robot (and of the control cabinet),
the control cabinet Doc. Module “Initial Start--up” must be observed.
Before any installation and exchange work is started, any attached tools or additional equip-
ment that would hinder the installation and exchange work must be dismounted.
The fork lift truck, lifting tackle and crane must be suitable for handling the
robot. For weight of robot see robot Doc. Module “Technical Data”.
The description of the installation and exchange operations is subdivided into job steps with
numbers in brackets appearing before them. The text which immediately follows these steps
must also be read if it is specially marked by a
warning triangle
or either of the
hand
symbols
, as many of these marked texts refer to the preceding job step.
Example
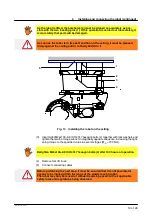
(8) Lower the robot slowly without tilting it.
The robot must be lowered vertically downwards until both locating pins are
free.






































































