





























Jaco® assistive robot User guide
11
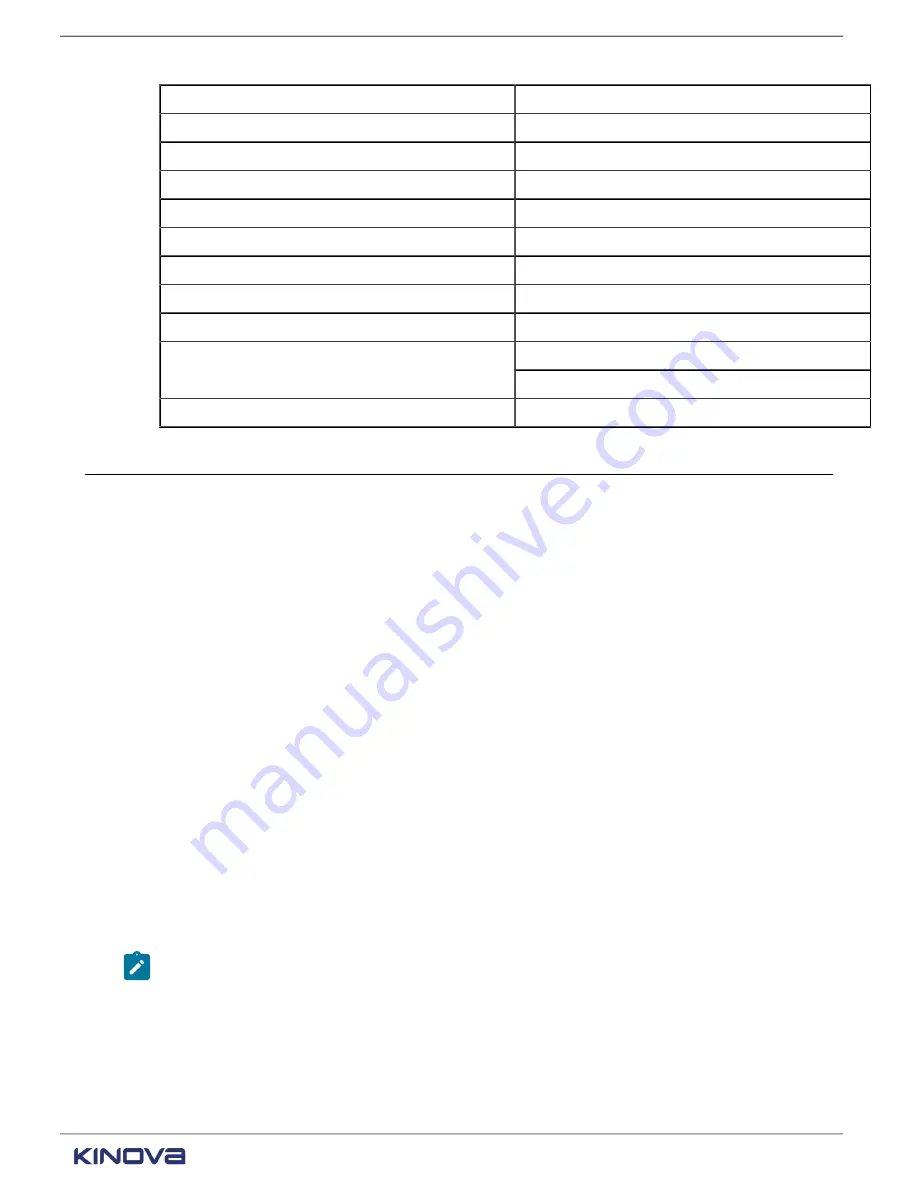
Joint range (software limitation)
± 27.7 turns
Maximum linear robot speed
20 cm / s
Power supply voltage
24 VDC
Average power
25 W (5 W in standby)
Peak power
100W
Water resistance
IPX2
Operating temperature
-10 °C to 40 °C
Operating humidity (no condensation)
15% to 90%
Operating environment
Do not use in corrosive environment
2 fingers: 25N
Gripper force
3 fingers: 40N
Expected life span
5 years
Robot control modes
This section describes control modes for the robot.
The control of the robot is said to be Cartesian as the user only controls movements of the robot
hand. The different joints are piloted automatically following the given command. The robot is
capable of different movements which may be divided into four control modes:
• translation mode
• wrist mode
• drinking mode
• finger mode
In
translation mode
, the user controls the position of the hand in space. The hand will always keep
its parallelism to the wheelchair seat frame. The possible movements are left/right, front/back, and
up/down of the hand.
In
wrist mode
, the user controls the position of the arm around the center point of the hand
(reference point) which will not move (or move slightly) when operating this mode. Lateral
orientation refers to a thumb/index circular movement of the wrist around the reference point.
Vertical orientation refers to a top/bottom circular movement of the wrist around the reference
point. Wrist rotation refers to a circular movement of the hand around itself.
Drinking mode
is to be used with the wrist rotation only. While operating the robot in drinking
mode, the reference point (normally set in the middle of the hand), is offset in height and length to
produce a rotation that will compensate when user drinks from a glass or bottle without a straw.
In
finger mode
, the user controls the opening and closing of two or three fingers.
Note:
The robot will sometimes respond differently to a given command than described
in this section. This may be due to the singularity (impossible robot position) avoidance
algorithms embedded in the kinematics. It is a normal protective behaviour of the robot and
is position dependent.
+1 514-277-3777
kinovarobotics.com
© 2021 Kinova inc. All rights reserved.
Summary of Contents for JACO
Page 1: ...Jaco assistive robot User guide ...
Page 4: ......







































































