





























Optidrive
ODV
‐
2
User
Guide
Revision
1.00
www.invertek.co.uk
23
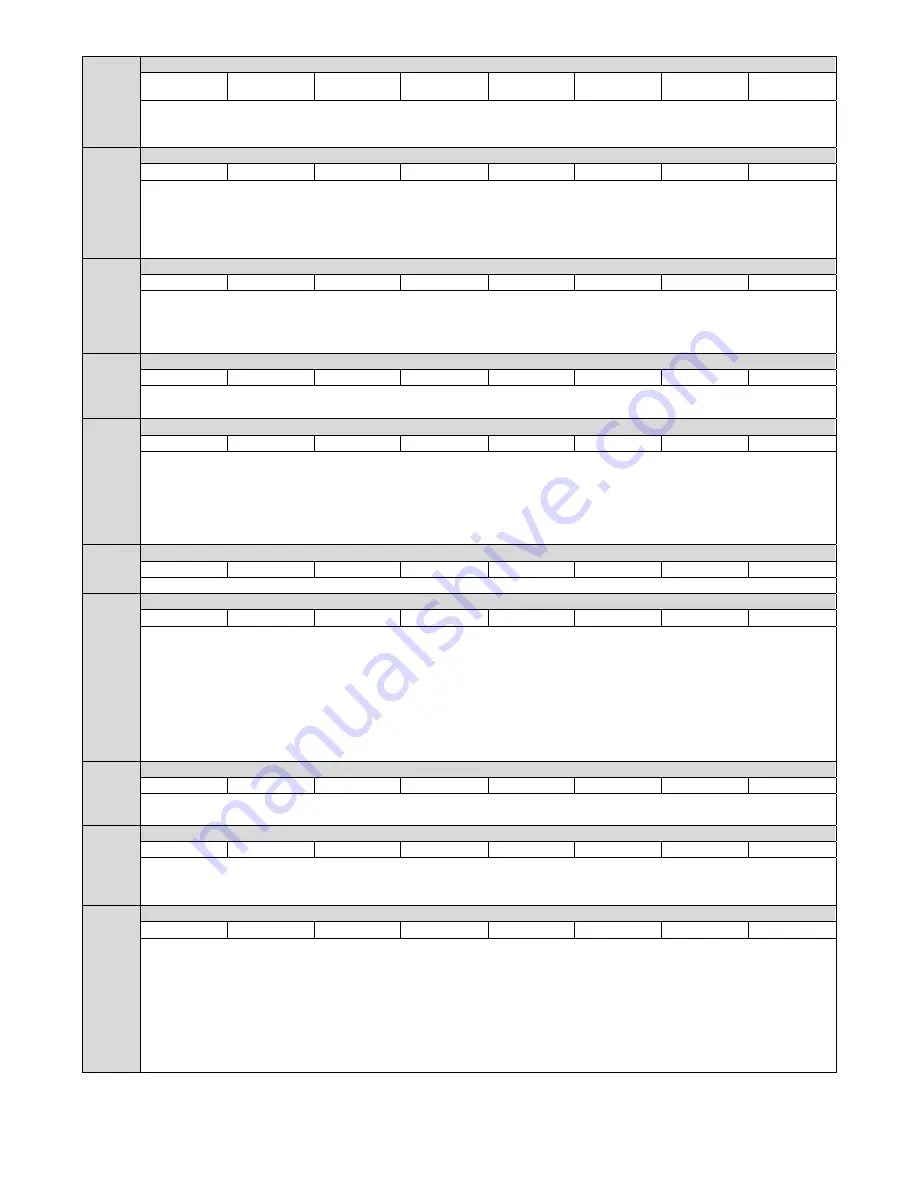
P2
‐
24
Effective
switching
frequency
Minimum
4kHz
Maximum
[Drive
Dependant]
Units
kHz
Default
[Drive
Dependant]
Effective
power
stage
switching
frequency.
Higher
frequencies
reduce
audible
noise
from
the
motor,
and
improve
the
output
current
waveform,
at
the
expense
of
increased
drive
losses.
Note:
De
‐
rating
of
the
drive
output
current
may
be
required
when
increasing
P2
‐
24
beyond
the
minimum
setting.
P2
‐
25
Fast
Deceleration
Ramp
Time
Minimum
0.0
Maximum
30.0
Units
Seconds
Default
0.0
This
parameter
allows
an
alternative
deceleration
ramp
down
time
to
be
programmed
into
the
Optidrive.
Fast
Deceleration
ramp
is
selected
Automatically
in
the
case
of
a
mains
power
loss
if
P2
‐
38
=
2.
When
ramp
rate
in
P2
‐
25
is
set
to
0.0,
the
drive
will
coast
to
stop.
Fast
deceleration
ramp
can
also
be
selected
using
the
user
defined
logic
configuration
parameters
in
menu
9
(P9
‐
02),
or
selection
configured
through
the
drive
PLC
function
using
the
OptiTools
Studio
Suite
PC
software.
P2
‐
26
Spin
Start
Enable
Minimum
0
Maximum
1
Units
‐
Default
1
0
:
Disabled
1
:
Enabled
.
The
drive
will
attempt
to
determine
if
the
motor
is
already
rotating
on
start
up
and
to
detect
rotational
speed
and
direction.
The
drive
will
begin
control
of
the
motor
from
its
current
(detected)
speed.
A
short
delay
may
be
observed
when
starting
the
drive
whilst
the
spin
start
function
is
completed.
P2
‐
27
Standby
Mode
Timer
Minimum
0.0
Maximum
250.0
Units
s
Default
0.0
This
parameter
defines
the
time
period,
whereby
if
the
drive
operates
at
minimum
speed
for
greater
than
the
set
time
period,
the
Optidrive
output
will
be
disabled,
and
the
display
will
show
stndby
.
The
function
is
disabled
if
P2
‐
27
=
0.0.
P2
‐
28
Slave
Speed
Scaling
Control
Minimum
0
Maximum
3
Units
‐
Default
0
Active
in
Keypad
mode
(P1
‐
12
=
1
or
2)
and
Slave
mode
(P1
‐
12=4)
only.
The
keypad
reference
can
be
multiplied
by
a
preset
scaling
factor
or
adjusted
using
an
analog
trim
or
offset.
0
:
Disabled
.
No
scaling
or
offset
is
applied.
1
:
Actual
Speed
=
Digital
Speed
x
P2
‐
29
2
:
Actual
Speed
=
(Digital
Speed
x
P2
‐
29)
+
Analog
Input
1
Reference
3
:
Actual
Speed
=
(Digital
Speed
x
P2
‐
29)
x
Analog
Input
1
Reference
P2
‐
29
Slave
Speed
Scaling
Factor
Minimum
‐
500.0
Maximum
500.0
Units
%
Default
100.0
Slave
speed
scaling
factor
used
in
conjunction
with
P2
‐
28.
P2
‐
30
Analog
Input
1
(Terminal
6)
Format
Minimum
‐
Maximum
‐
Units
‐
Default
U 0-10
U 0-10
=
0
to
10
Volt
Signal
(Uni
‐
polar)
U 10-0
=
10
to
0
Volt
Signal
(Uni
‐
polar)
-10-10
=
‐
10
to
+10
Volt
Signal
(Bi
‐
polar)
A 0-20
=
0
to
20mA
Signal
t 4-20
=
4
to
20mA
Signal,
the
Optidrive
will
trip
and
show
the
fault
code
4-20F
if
the
signal
level
falls
below
3mA
r 4-20
=
4
to
20mA
Signal,
the
Optidrive
will
ramp
to
preset
speed
4
if
the
signal
level
falls
below
3mA
t 20-4
=
20
to
4mA
Signal,
the
Optidrive
will
trip
and
show
the
fault
code
4-20F
if
the
signal
level
falls
below
3mA
r 20-4
=
20
to
4mA
Signal,
the
Optidrive
will
ramp
to
preset
speed
4
if
the
signal
level
falls
below
3mA
P2
‐
31
Analog
Input
1
scaling
Minimum
0.0
Maximum
500.0
Units
%
Default
100.0
P2
‐
31
is
used
to
scale
the
analog
input
prior
to
being
applied
as
a
reference
to
the
drive.
For
example,
if
P2
‐
30
is
set
for
0
–
10V,
and
the
scaling
factor
is
set
to
200.0%,
a
5
volt
input
will
result
in
the
drive
running
at
maximum
speed
(P1
‐
01)
P2
‐
32
Analog
Input
1
Offset
Minimum
‐
500.0
Maximum
500.0
Units
%
Default
0.0
P2
‐
32
defines
an
offset
for
the
analog
input,
as
a
percentage
of
the
full
range
of
the
input.
A
positive
offset
is
deducted
from
the
incoming
analog
signal
and
a
negative
offset
is
added
to
the
signal.
For
example,
if
P2
‐
30
is
set
for
0
–
10V,
and
the
analog
offset
is
set
to
10.0%,
then
1
volt
(10%
of
10V)
will
be
deducted
from
the
incoming
analog
reference
prior
to
it
being
applied.
P2
‐
33
Analog
Input
2
(Terminal
10)
Format
Minimum
‐
Maximum
‐
Units
‐
Default
U 0-10
U 0-10
=
0
to
10
Volt
Signal
(Uni
‐
polar)
U 10-0
=
10
to
0
Volt
Signal
(Uni
‐
polar)
Ptc-th
=
Motor
PTC
Thermistor
Input
A 0-20
=
0
to
20mA
Signal
t 4-20
=
4
to
20mA
Signal,
the
Optidrive
will
trip
and
show
the
fault
code
4-20F
if
the
signal
level
falls
below
3mA
r 4-20
=
4
to
20mA
Signal,
the
Optidrive
will
ramp
to
preset
speed
8
if
the
signal
level
falls
below
3mA
t 20-4
=
20
to
4mA
Signal,
the
Optidrive
will
trip
and
show
the
fault
code
4-20F
if
the
signal
level
falls
below
3mA
r 20-4
=
20
to
4mA
Signal,
the
Optidrive
will
ramp
to
preset
speed
8
if
the
signal
level
falls
below
3mA
Summary of Contents for Optidrive HVAC Series
Page 1: ......





















































