





























Chapter 2 - Commissioning
19
XtrapulsCD1-pm - User manual
14.1
– SECOND POSITION SENSOR FEEDBACK
Resolver sensor feedback for the motor, and TTL incremental encoder for the second sensor is the default
configuration.
Select the required position sensor configuration in the "
Resolver & encoder Input configuration
" window
accessible in the "
Setup
" menu.
Open the "
Position scaling parameters
" window accessible in the "
Positioner Application Setup
" menu.
Select "
Enable second sensor feedback
" to use the second position sensor (encoder or resolver) for closing the
drive position loop. When this command is not selected, the drive position loop is using the motor position sensor
(resolver or encoder) for feedback.
Set the “
Position resolution
” parameter according to the desired position scaling of the load in order to display
the position in the load units as described below:
Position resolution = number of desired load position increments for one motor shaft revolution.
Enter the desired "Decimal" number and the "Unit" for the position display.
Ex: one motor revolution = 3.302 mm on the load, if the load position must be displayed in mm with a resolution of
1
m, choose Position resolution = 3302, Decimal number = 3 and Unit = mm.
Remark: In the second sensor feedback configuration, the servo loop stability is affected by a wrong Position
resolution parameter value.
Set at 0 the value of the “
Position deadband
” parameter. This parameter is only useful in applications with high
transmission backlashes or applications with high axis frictions. In those cases, when the position error value at
standstill is lower than the value of the “
Position deadband
” parameter, the proportional gain of the position loop
is set at 0.
Open the "
Second Sensor
" window accessible in the "
Positioner Application Setup
" menu.
Adjust the "
Position scaling factor
" (numerator / denominator) according to the desired load position scaling and
the current load sensor resolution as described below:
- For an encoder sensor type on the load:
Position scaling factor Numerator = "Position resolution" parameter value (see “
Position scaling parameters”
window).
Position scaling factor Denominator = 4 x number of encoder pulses/channel for one motor shaft revolution.
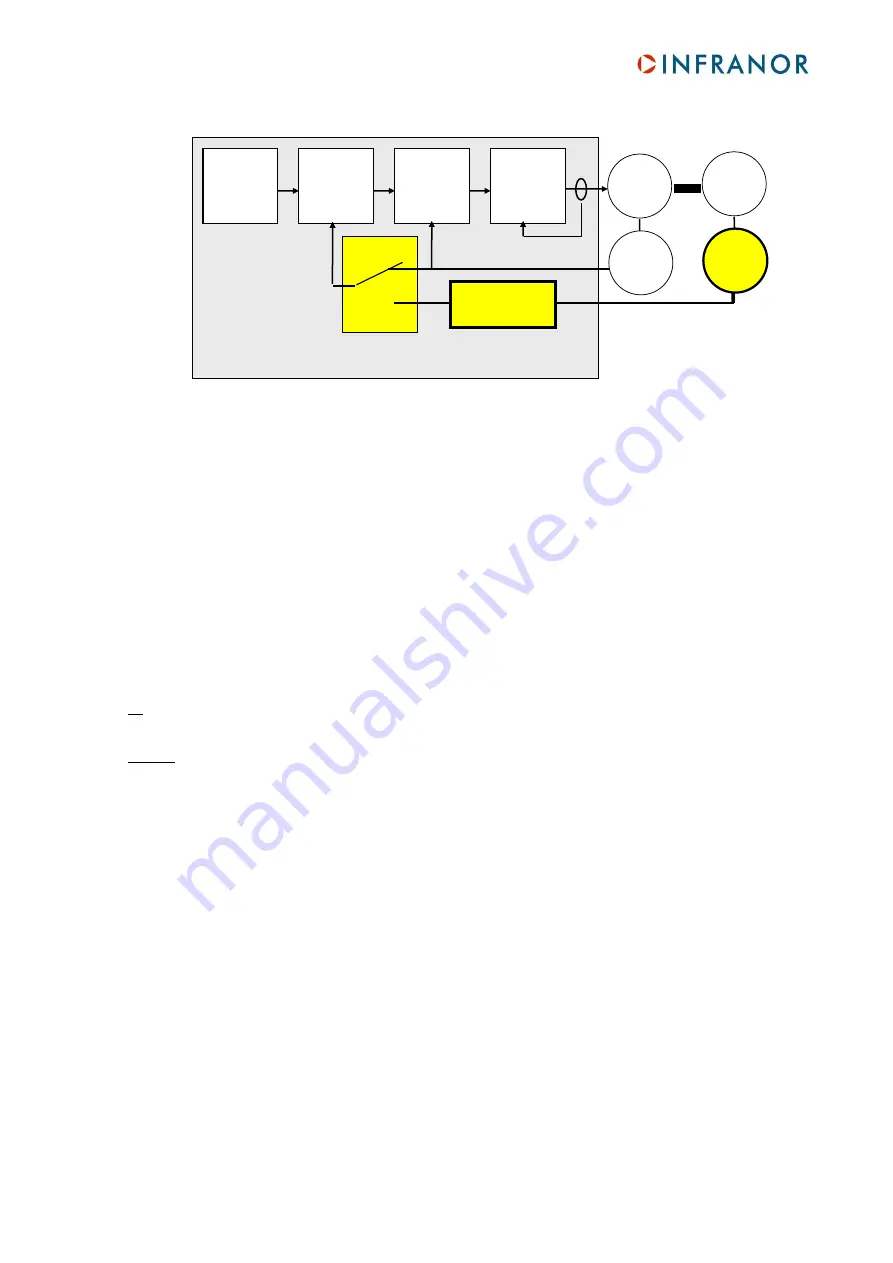
Trajectory
generator
Position
loop
Speed
loop
Current loop
Motor
Motor
feedback
Load
position
Load
Scaling factor
Num / Den
Enable
2
nd
sensor





















































