


















8 |
P a g e
EXAMPLE SIMPLE TRACK SETTING
CASE
SETTING MENU
EXPLANATION
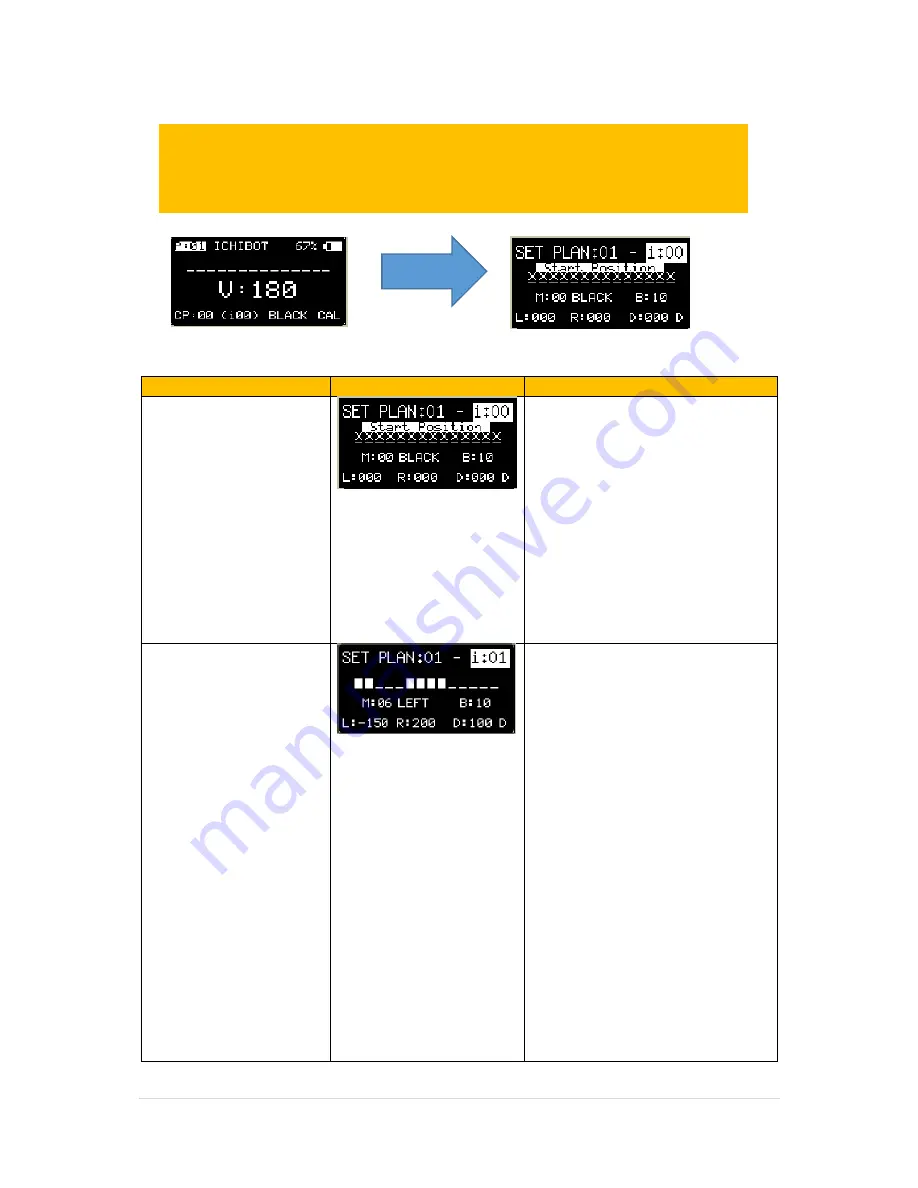
Case 0 (start Position)
In
i:00
or start position,
sensor mode
(M:00) can not be replaced so leave it
default.
Select Action
BLACK
because we start
on the black line.
let the other settings default because
in this case we do not set the
direction of motion in the start
position.
select menu in the index setting
(i:
00
) and increase the value to
(i: 01)
then we will setup for the next case
(case 1).
Case 1
in this case the robot must turn left
when the left sensor touches the
line.
then we select the sensor mode on
M: xx
, we select the middle sensor
and the left sensor. because if we
choose a mode that uses the left
sensor only, it is feared when the
robot runs from the starting point
and the left robot sensor will touch
the line in the middle of the road so
that the robot will perform the action
is not in the proper position. by
selecting the sensor mode conditions
on the two sensor positions then it
will be safer.
Next select the action:
LEFT
because
the robot must turn left.
set the
L, R and D
values by default,
or adjust according to the values you
get for your robot. see the
explanation below.
To solve this case, In
Main Menu
Select pointer to
“P:”
and
adjust “
P”
Value to
01
then press
Enter
Button, so LCD display will show
Plan
Menu.
You can make many Plan just choose the menu plan number.
:01





















































