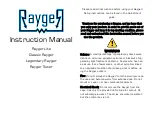
3.8 I / O Signal Setting
3.8.1 I/O signal setting of original point return (Initial position must be established
after turning on power.)
•
Motion
description:
Moving
from
the
initial
position
toward
the
original
position
with
constant
speed
after
confirming
the
original
position
and
auto
-
tune
,
it
will
move
to
the
location
of
1mm
.
(
1mm
is
the
distance
between
two
grippers
)
IN
START
BUSY
ALARM
0 mm/s
輸入訊號
10ms
以上
運動模式
SPEED
輸出訊號
ON
OFF
ON
OFF
ON
OFF
ON
OFF
[Description 1] After turning on the power, encoder will confirm the original position
through the reversionary motion of origin.
[Description 2] The built-in reversion of origin is the opening of IN0
、
IN1
、
IN2
、
IN3
、
IN4.
It can also be set up by the user separately.
[Description 3] It is necessary that the timing of opening the input signal START is to be
the time of opening the input signal IN afterward.
[Description 4] It is necessary that the timing of ending the input signal START is to be the
time of opening the output signal BUSY afterward, and recommended that
is to be pending over 10ms after opening the output signal START.
[Description 5] After ending the output signal BUSY, it indicates that the motion is ended.
[Description 6] If the abnormal state appears during the motion process or after the
ending of motion, the output signal ALARM will be opened.
[Description 7] If the output signal ALARM is opened, please re-do the reversionary motion
of origin once more.
Operation
Input
signal
or more
Output
signal
C02UE03-1711
18