





























6 Robot Connection
30
WARNING!
Trip hazard
Ensure that the cables and hoses for media and power supply are properly laid and secured.
WARNING!
Unexpected movements of the robot
Only connect the power supply when you are certain that assembly has been fully com-
pleted and is correct.
ATTENTION!
Only use the original cables supplied with the robot system. Do not use the robot for
applications that expose the cables to bending.
6.2
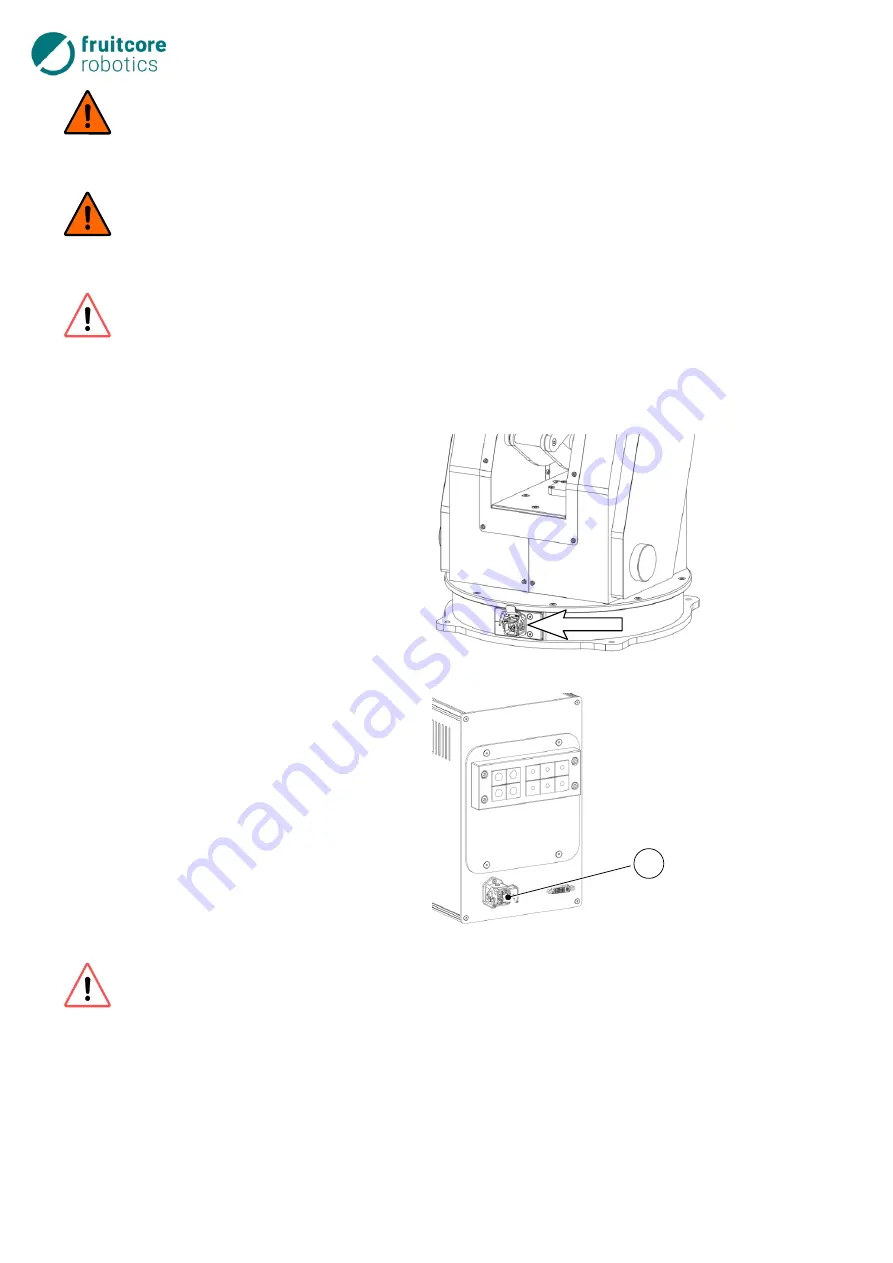
Robot Connection
Connect the robot to the horstCON-
TROL using the connection cable.
Fig. 6-1: Interface on the robot
1 Robot connection to horstCONTROL
Fig. 6-2: Robot connection to horstCONTROL
ATTENTION!
The robot connection cable must be plugged into the horstCONTROL before the power is
switched on. It must only be plugged in or disconnected in a deenergized state.
The robot must never be disconnected during operation.
The cable must not be extended or opened.
1
Summary of Contents for HORST900
Page 3: ...III ...







































































